ROS2自动驾驶
yolo5自动驾驶
1、重要!更换U盘的操作指引
2、关闭开机自启动大程序
3、Linux基础
4、YoloV5训练集
5、自动驾驶基础调试(代码解析)
6、自动驾驶特调
7、自动驾驶原理
8、PID算法理论
9、阿克曼运动学分析理论
10、建立运动学模型
常用命令
!重要!首次使用
一、原理分析
麦克纳姆轮运动学分析
二、AI大模型
3、AI大模型类型和原理
4、RAG检索增强和模型训练样本
5、具身智能机器人系统架构
6、具身智能玩法核心源码解读
7、配置AI大模型
8、配置API-KEY
三、深度相机
2、颜色标定
10、深度相机的基础使用
11、深度相机伪彩色图像
12、深度相机测距
13、深度相机色块体积测算
14、深度相机颜色跟随
15、深度相机人脸跟随
16、深度相机KCF物体跟随
17、深度相机Mediapipe手势跟随
18、深度相机视觉循迹自动驾驶
19、深度相机边缘检测
四、多模态视觉理解
20、多模态语义理解、指令遵循
21、多模态视觉理解
22、多模态视觉理解+自动追踪
23、多模态视觉理解+视觉跟随
24、多模态视觉理解+视觉巡线
25、多模态视觉理解+深度相机距离问答
26、多模态视觉理解+SLAM导航
27、多模态视觉理解+SLAM导航+视觉巡线
28、意图揣测+多模态视觉理解+SLAM导航+视觉功能
五、雷达
8、雷达基础使用
思岚系列雷达
六、建立地图
9、Gmapping建图
cartographer快速重定位导航
RTAB-Map导航
RTAB-Map建图
slam-toolbox建图
cartographer建图
Navigation2多点导航避障
Navigation2单点导航避障
手机APP建图与导航
七、新机器人自动驾驶与调整
多模态视觉理解+SLAM导航
新机器人自动驾驶
场地摆放及注意事项
启动测试
识别调试
无人驾驶的车道保持
无人驾驶路标检测
无人驾驶红绿灯识别
无人驾驶之定点停车
无人驾驶转向决策
无人驾驶之喇叭鸣笛
无人驾驶减速慢行
无人驾驶限速行驶
无人驾驶自主泊车
无人驾驶综合应用
无人驾驶融合AI大模型应用
八、路网规划
路网规划导航简介
构建位姿地图
路网标注
路网规划结合沙盘地图案例
路径重规划
九、模型训练
1、数据采集
2、数据集标注
3、YOLOv11模型训练
4、模型格式转换
十、YOLOV11开发
多机通讯配置
汝城县职业中等专业学校知识库-信息中心朱老师编辑
-
+
首页
一、原理分析
麦克纳姆轮运动学分析
麦克纳姆轮运动学分析
## 麦克纳姆轮介绍 在工业制造盛世年代,人们就感受到传统车辆的转向在一些特定的环境里面使用起来非常不方便,例如在航天航空领域的部件组装中,使用传统车辆运载拼装会消耗大量的人力、物力和时间。在精确到零点几毫米的情况下,对不准的话只能重新校正。对于高精尖的大型设备而言,效率高意味着可以甩开对手几条街。如果能找到一种让车辆不用转动车身就能任意角度平移、旋转,就能完美解决这个问题。 直到1973年,瑞典的麦克纳姆公司研发了一种比较实用的方案被广泛采纳,也就我们今天要介绍的麦克纳姆轮了。 麦克纳姆轮(以下简称麦轮)是由轮毂和围绕轮毂的辊子组成的,辊子是一种没有动力的从动小滚轮,麦克纳姆轮辊子轴线和轮毂轴线夹角是45度,并且有互为镜像关系的A、B轮两种,或者会被称为左旋轮和右旋轮。这一般会在轮毂上面有标识A和B、L和R。  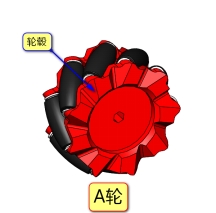   ### 14.1.2、麦克纳姆轮运动分析及方向确定 前面提到麦轮分AB两种,如果A轮向前运动时同时向右运动,即斜向右前方运动,那么相反,A轮向后运动的同时会向左运动,即斜向左后方运动;相应B轮就可以斜向左前和右后方运动。 **以小车车头为正方向,约定轮子前进时的方向为电机正转,轮子后退时的方向为电机反转。(以下全部课程都以此方向来说明)** 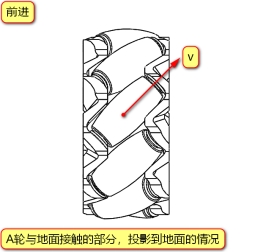 拿A轮来说,辊子移动方向上由于滚动从而无法提供前进的力,而在辊子轴线方向上辊子无法滚动并且与地面摩擦产生辊子轴向上的摩擦力,即斜向右前或左后方向,从而A轮的速度方向是斜向右前或左后;同理可分析B轮。 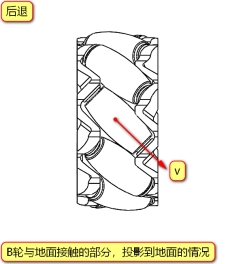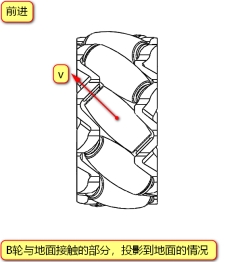 根据我们高中学到的物理知识,我们知道速度是可以正交分解的,决定车体运动取决于四个麦轮的合速度方向。 那么A轮就可以分解成轴向向右和垂直轴向向前的速度分量,或者说轴向向左和垂直轴向向后的速度分量。 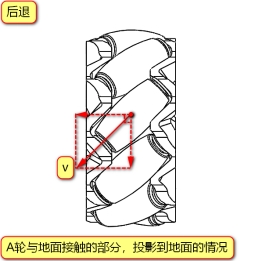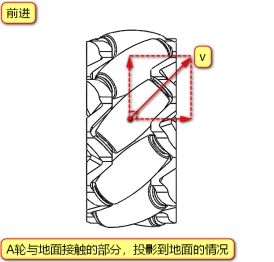 这样,B轮的速度分量和A轮互为镜像关系了。 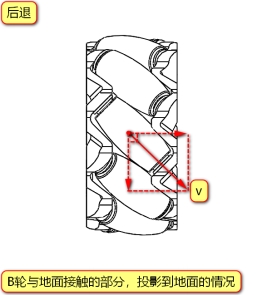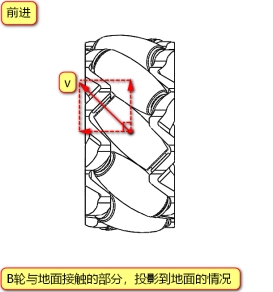 ### 14.1.3、麦克纳姆轮安装组合及运动分析 在知道AB轮的速度分量之后,我们就可以对四轮的麦克纳姆轮底盘进行排列组合了:AAAA,BBBB,AABB…… 是不是所有的组合都能实现全方位的移动呢?并不是的。 下面我们就只举其中的一个错误例子和一个正确例子,其余的可以自行推理(其实是太多了)。 **分析错误例子【AAAA】** 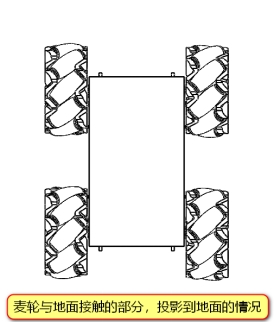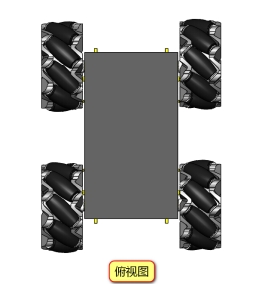 这个一看就不靠谱,但是我们还是来分析一下,因为作为一个错误例子,非常容易分析清楚它到底错在哪里。前面我们讲过A轮的速度分量要么是前加右,要么是后加左。 当四个轮子同时向前转动的时候,每个轮子都会有一个向左的速度分量,这样就会导致整个底盘前进的时候必然会同时向左运动;同理,后退的时候必然会向右运动,这样就没办法使用了,这个东西不受控制到处乱跑,这不是我们想要的全向移动。 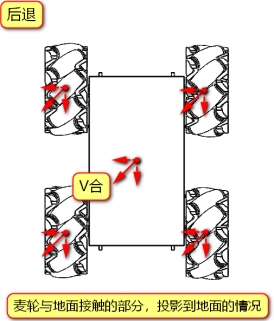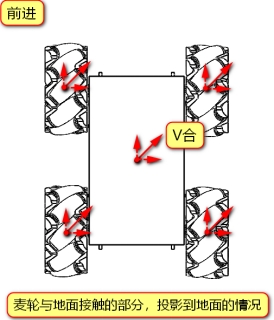 **正确的麦轮分布应该是【ABBA】** 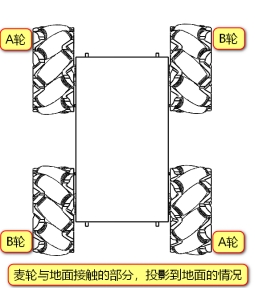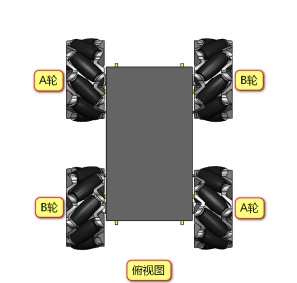 当四个轮子都向前转的时候,AB轮可以相互抵消轴向速度,只剩下向前的速度,这样底盘就是向前直行、不会跑偏,后退同理; 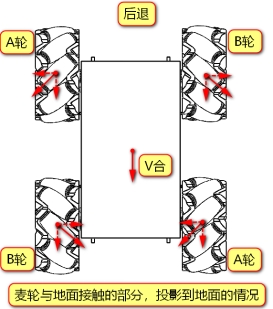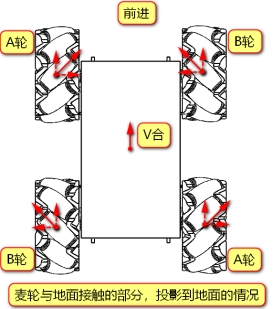 如果当A轮正转、B轮反转的时候,向前向后的速度会抵消,仅剩下向右的速度,那么底盘就会向右平移; 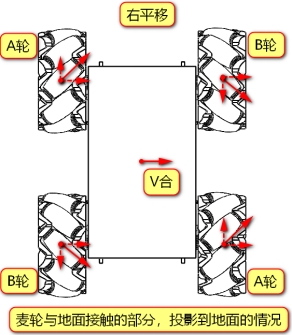 相反,如果A轮反转,B轮正转,就会向左平移; 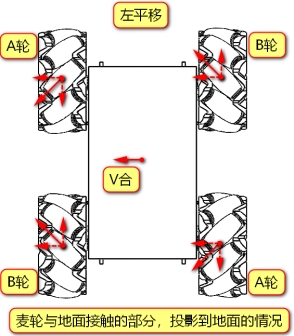 最后底盘左侧轮子正转、右侧轮子反转,就可以实现向右旋转;反之,底盘就会向左旋转了。 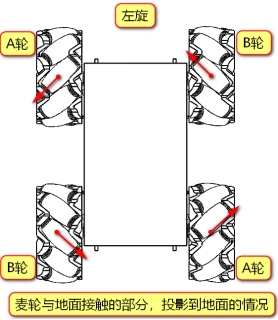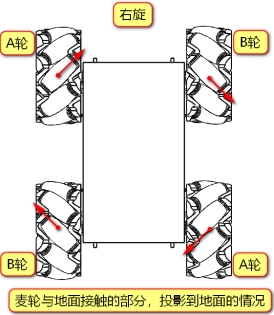 另外,当A轮正转、B轮不动时,底盘会向右前方运动; A轮反转、B轮不动时底盘向左后方运动。 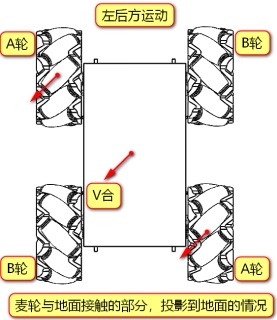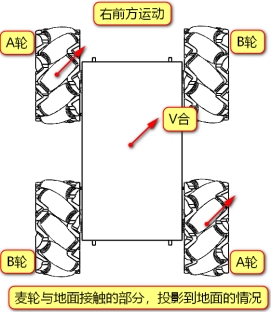 相应地,A轮不动、B轮正转,底盘向左前方运动; A轮不动、B轮反转,底盘向右后方运动。 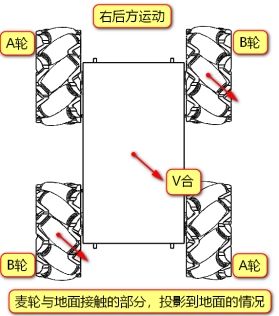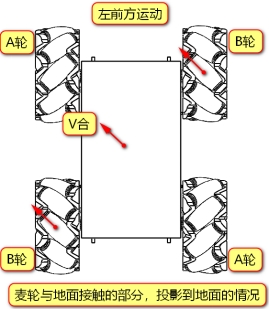 另外还有四种绕轴中点旋转的移动方式。 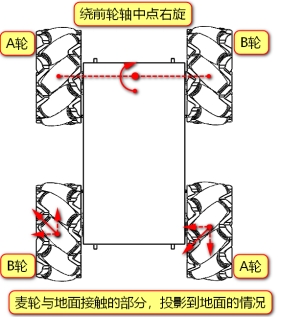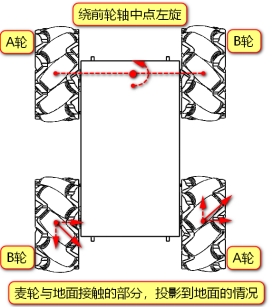 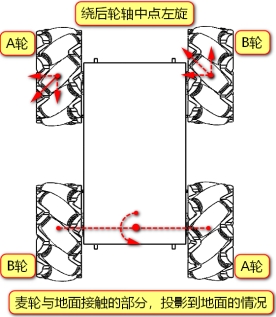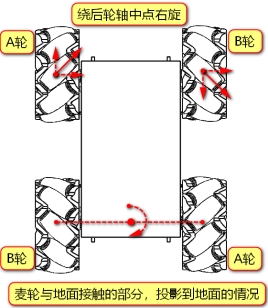 【思考】以上四种情况是不是与平移很相似,当不动的两个轮子像平移那样动起来,但是速度小于另外两个轮子的速度,麦轮底盘会怎么移动呢? ### 14.1.4、麦克纳姆轮的安装位置 前面我们讲解完了麦轮的安装组合,安装四个麦轮的位置还有讲究。 四个轮子与地面接触点所围成的形状主要为正方形和长方形。不排除有奇葩形状,但是这里只针对正方形和长方形分析。 正方形:四个轮子位于正方形的四个顶点,平移和旋转都没有任何问题。受限于机器人底盘的形状、尺寸等因素,这种安装方式虽然理想,但可遇而不可求。 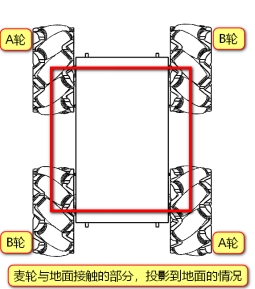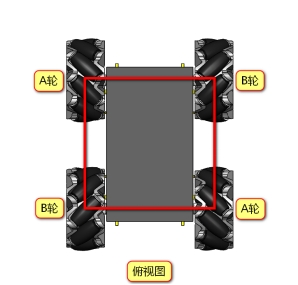 我们使用的车底盘加装麦轮之后是经过精心设计的正方形,是最为理想的麦轮车底盘。 长方形:轮子转动可以产生 Yaw 轴转动力矩,而且转动力矩的力臂也比较长。是最常见的安装方式。 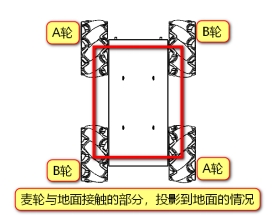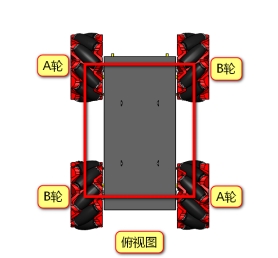 通过对比传统车辆,我们可以发现,普通车辆在移动的时候轮子都是向一个方向转,而使用麦轮的车子在做全向移动的时候,像以上分析的那样,每个麦轮的运动方向都不一样,所以麦轮想要做到真正的全向移动,每个麦轮都需要一个单独的电机来驱动,如此一来,就还需要一套控制系统来把握每个轮子的转向和转速。 实现全向移动一般会使用全向轮和麦克纳姆轮,以上我们主要介绍了麦轮的移动方式和安装组合。全向轮与麦轮在结构、力学特性、运动学特性上都有差异,其本质原因是轮毂轴与辊子转轴的角度不同。经过分析,二者的运动学和力学特性区别可以通过以下表格来体现。 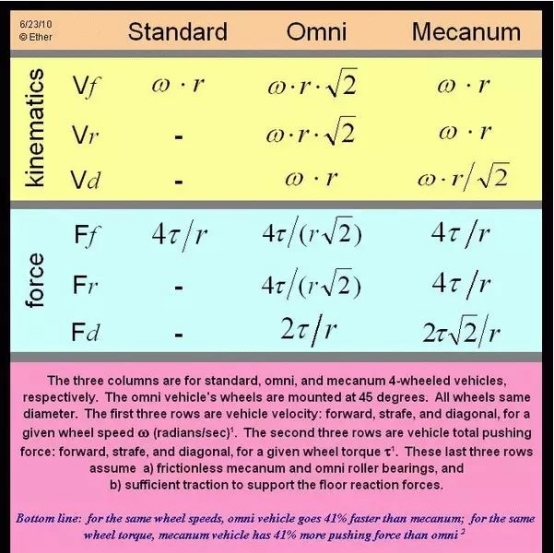 计算过程如下,仅供参考: 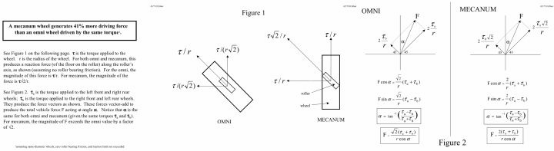 ### 最终安装方法 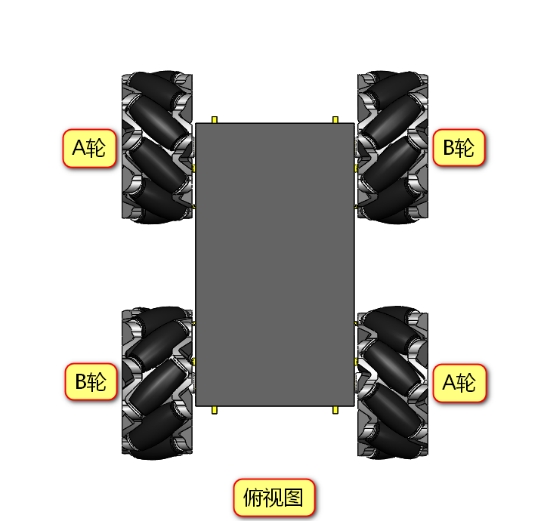
admin
2025年12月7日 21:17
293
转发
收藏文档
上一篇
下一篇
手机扫码
复制链接
手机扫一扫转发分享
复制链接
分享
链接
类型
密码
更新密码
有效期
Markdown文件
Word文件
PDF文档
PDF文档(打印)
AI