ROS2自动驾驶
yolo5自动驾驶
1、重要!更换U盘的操作指引
2、关闭开机自启动大程序
3、Linux基础
4、YoloV5训练集
5、自动驾驶基础调试(代码解析)
6、自动驾驶特调
7、自动驾驶原理
8、PID算法理论
9、阿克曼运动学分析理论
10、建立运动学模型
常用命令
!重要!首次使用
一、原理分析
麦克纳姆轮运动学分析
二、AI大模型
3、AI大模型类型和原理
4、RAG检索增强和模型训练样本
5、具身智能机器人系统架构
6、具身智能玩法核心源码解读
7、配置AI大模型
8、配置API-KEY
三、深度相机
2、颜色标定
10、深度相机的基础使用
11、深度相机伪彩色图像
12、深度相机测距
13、深度相机色块体积测算
14、深度相机颜色跟随
15、深度相机人脸跟随
16、深度相机KCF物体跟随
17、深度相机Mediapipe手势跟随
18、深度相机视觉循迹自动驾驶
19、深度相机边缘检测
四、多模态视觉理解
20、多模态语义理解、指令遵循
21、多模态视觉理解
22、多模态视觉理解+自动追踪
23、多模态视觉理解+视觉跟随
24、多模态视觉理解+视觉巡线
25、多模态视觉理解+深度相机距离问答
26、多模态视觉理解+SLAM导航
27、多模态视觉理解+SLAM导航+视觉巡线
28、意图揣测+多模态视觉理解+SLAM导航+视觉功能
五、雷达
8、雷达基础使用
思岚系列雷达
六、建立地图
9、Gmapping建图
cartographer快速重定位导航
RTAB-Map导航
RTAB-Map建图
slam-toolbox建图
cartographer建图
Navigation2多点导航避障
Navigation2单点导航避障
手机APP建图与导航
七、新机器人自动驾驶与调整
多模态视觉理解+SLAM导航
新机器人自动驾驶
场地摆放及注意事项
启动测试
识别调试
无人驾驶的车道保持
无人驾驶路标检测
无人驾驶红绿灯识别
无人驾驶之定点停车
无人驾驶转向决策
无人驾驶之喇叭鸣笛
无人驾驶减速慢行
无人驾驶限速行驶
无人驾驶自主泊车
无人驾驶综合应用
无人驾驶融合AI大模型应用
八、路网规划
路网规划导航简介
构建位姿地图
路网标注
路网规划结合沙盘地图案例
路径重规划
九、模型训练
1、数据采集
2、数据集标注
3、YOLOv11模型训练
4、模型格式转换
十、YOLOV11开发
多机通讯配置
汝城县职业中等专业学校知识库-信息中心朱老师编辑
-
+
首页
六、建立地图
Navigation2单点导航避障
Navigation2单点导航避障
## Navigation2单点导航避障 ### 1、程序功能说明 运行程序后,rviz中会加载地图。在rviz界面中,用【2D Pose Estimate】工具给定小车初始位姿,然后用【2D Goal Pose】工具给定小车一个目标点。小车结合自身环境,会规划出一条路径并且根据规划的路径移动到目的地,期间如果遇到障碍物,会自助避障,到达目的地后停车。 ### 2、Navigation2简介 #### 2.1 简介 Navigation2整体架构图 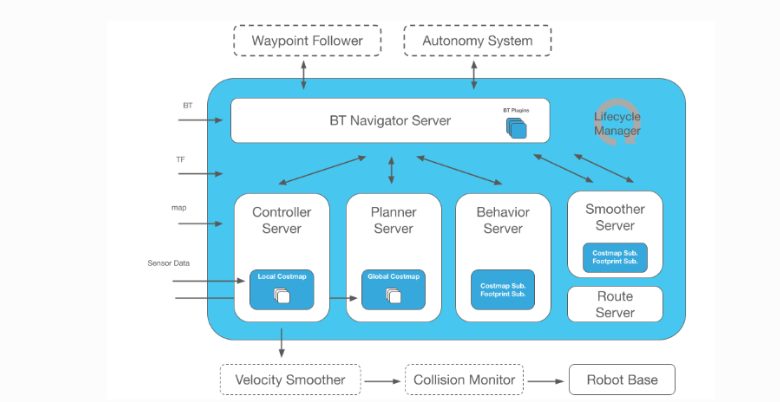 Navigation2具有下列工具: * 加载、提供和存储地图的工具(地图服务器Map Server) * 在地图上定位机器人的工具 (AMCL) * 避开障碍物从A点移动到B点的路径规划工具(Nav2 Planner) * 跟随路径过程中控制机器人的工具(Nav2 Controller) * 将传感器数据转换为机器人世界中的成本地图表达的工具(Nav2 Costmap 2D) * 使用行为树构建复杂机器人行为的工具(Nav2 行为树和BT Navigator) * 发生故障时计算恢复行为的工具(Nav2 Recoveries) * 跟随顺序航点的工具(Nav2 Waypoint Follower) * 管理服务器生命周期的工具和看门狗(Nav2 Lifecycle Manager) * 启用用户自定义算法和行为的插件(Nav2 Core) Navigation 2(Nav 2)是ROS 2中自带的导航框架,其目的是能够通过一种安全的方式使移动机器人从A点移动到B点。所以,Nav 2可以完成动态路径规划、计算电机速度、避开障碍物和恢复结构等行为。 Nav 2使用行为树(BT,Behavior Trees)调用模块化服务器来完成一个动作。动作可以是计算路径、控制工作(control efforts)、恢复或其他与导航相关的动作。这些动作都是通过动作服务器与行为树(BT)进行通信的独立节点。 #### 2.2 相关资料 Navigation2 文档:[https://navigation.ros.org/index.html](https://navigation.ros.org/index.html) Navigation2 github:[https://github.com/ros-planning/navigation2](https://github.com/ros-planning/navigation2) Navigation2 对应的论文:[https://arxiv.org/pdf/2003.00368.pdf](https://arxiv.org/pdf/2003.00368.pdf) ### 3、运行案例 #### 3.1 使用前说明 本节课程以树莓派5为例。树莓派5和Jetson-nano主板,需要在宿主机中打开终端,然后输入进入docker容器的指令,进入到docker容器后的终端里边输入本节课程提及的指令,宿主机进入docker容器的教程可以参考本产品教程**【机器人配置与操作指引】中的【5、进入小车Docker(Jetson-Nano和树莓派5用户看这里)】**的内容。RDKX5、Orin主板直接打开终端,输入本节课程提及的指令即可。 #### 3.2 单点导航功能 **注意:** * **jetson nano、树莓派**系列主控需要先进入docker容器**(步骤请参见【Docker课程】--- 【4、Docker启动脚本】)** 下面所有指令的docker终端都需要进入同一个docker容器后执行**(步骤请参见【Docker课程】--- 【3、Docker提交与多终端进入】)** * 本章节课程需要至少已经存在一张已经建好的地图,参考**【5、gmapping建图】、【6、cartographer建图】、【7、slam\_toolx建图】**任意一节SLAM建图课程 机器人车机终端启动底层传感器命令: ` ros2 launch yahboomcar_nav laser_bringup_launch.py ` 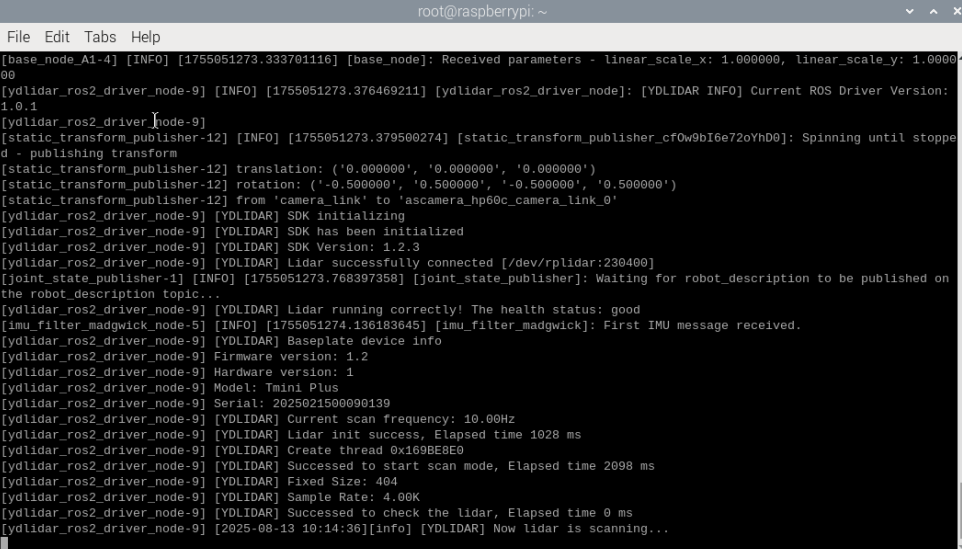 输入指令启动rviz可视化建图 (rviz可视化功能在车机端或虚拟机端启动都可以,**任选一种**方式启动,禁止虚拟机端和车机端重复启动:),下图是在车机端输入, ` ros2 launch yahboomcar_nav display_nav_launch.py ` 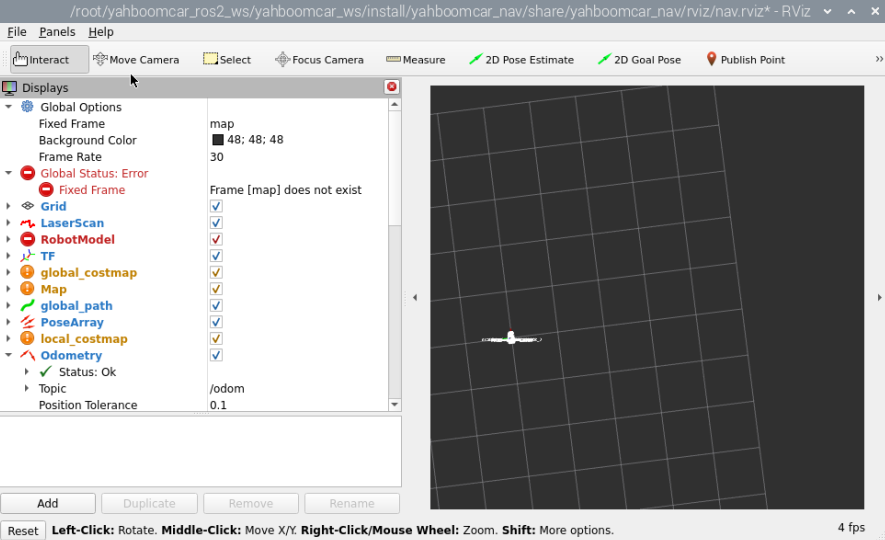 此时还没有显示地图加载,因为还没有启动导航的程序,所以没有地图加载。接下来运行导航节点,终端输入 ``` #导航算法二选一 #teb ros2 launch yahboomcar_nav navigation_teb_launch.py #dwa ros2 launch yahboomcar_nav navigation_dwa_launch.py ``` 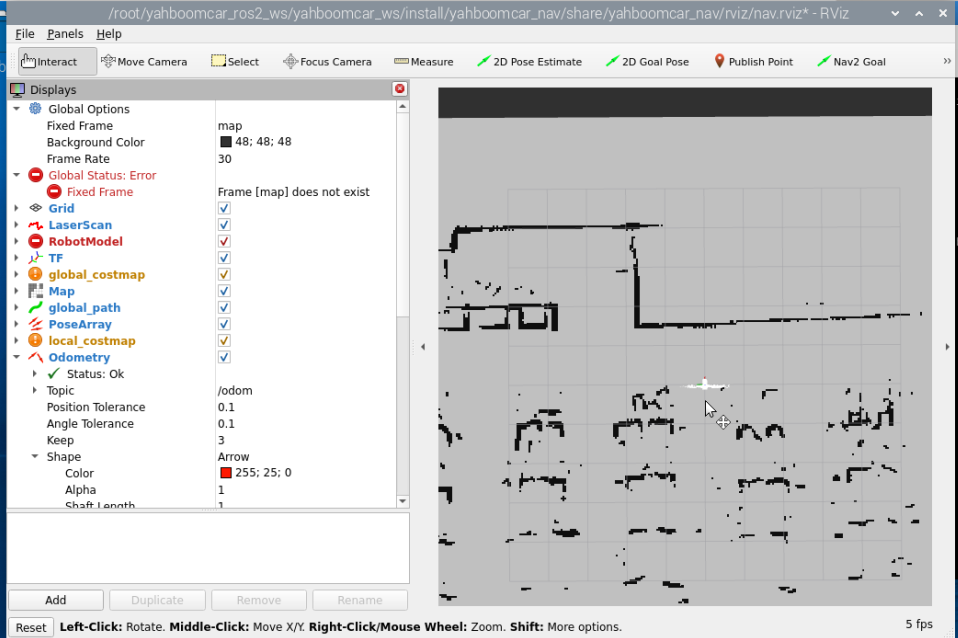 此时可以看到地图加载进去了,然后我们点击【2D Pose Estimate】,给小车设置初始位姿,根据小车在实际环境中的位置,在rviz中用鼠标点击拖动,小车模型移动我们设置的位置。如下图所示,雷达扫描的区域与实际障碍物大致重合则表示位姿准确。位姿初始化完成后,rviz界面中会出现机器人模型和膨胀区域 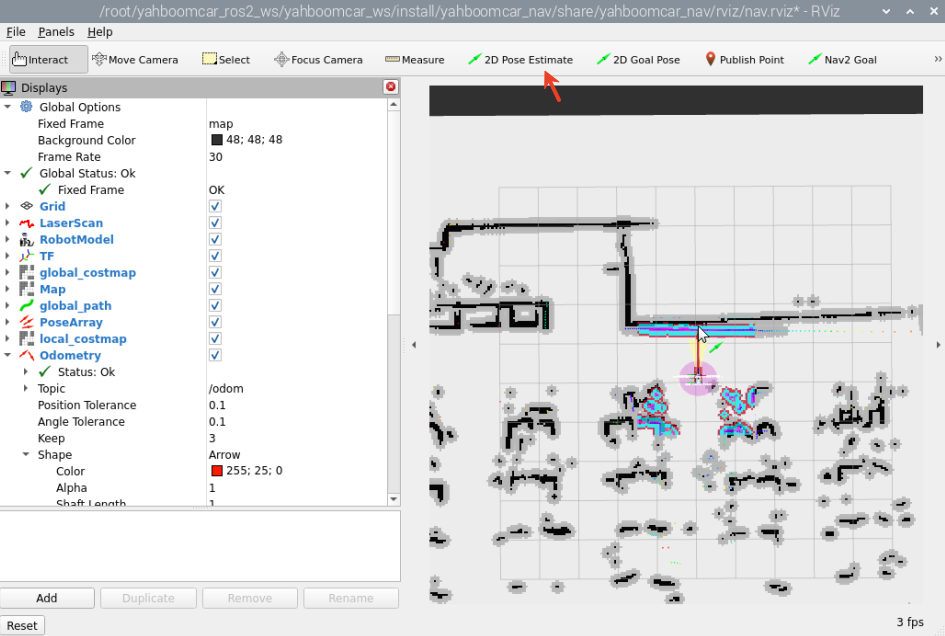 单点导航,点击【2D Goal Pose】工具,然后在rviz中使用鼠标选择一个目标点和目标朝向,然后释放 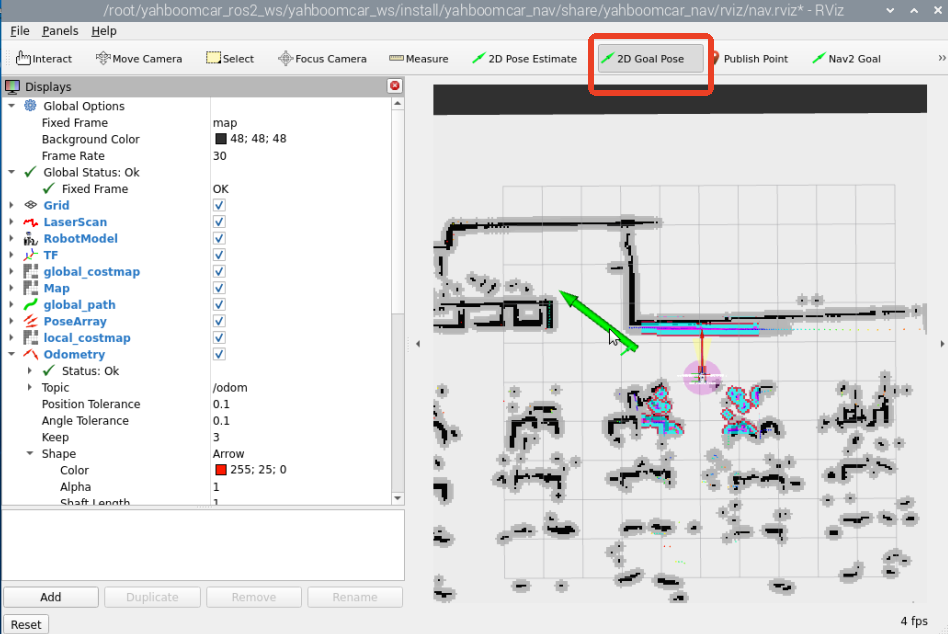 小车结合周围的情况,规划出一条路径并且沿着路径移动到目标点。 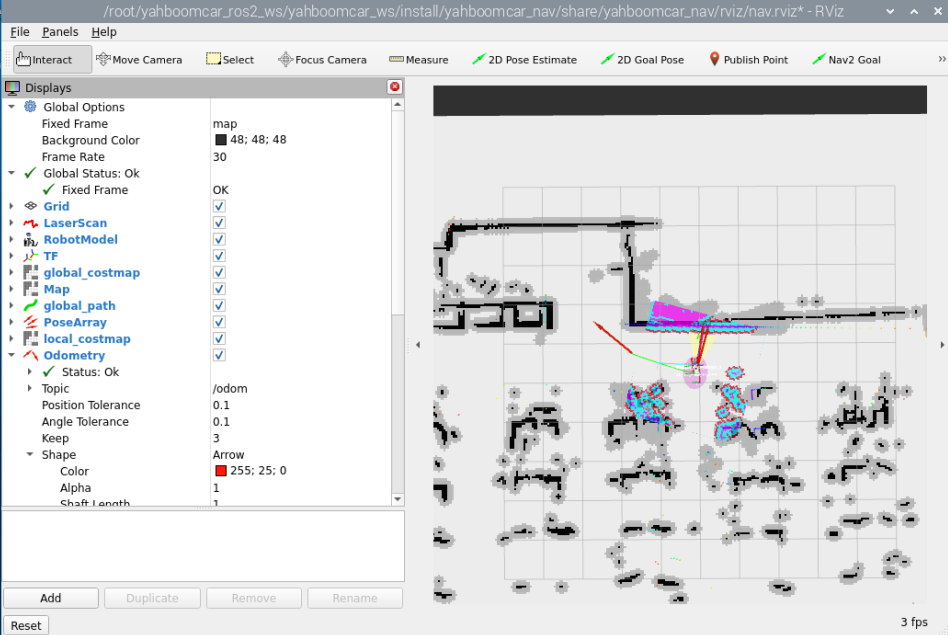 机器人成功抵达目标点后,车机终端会提示 Goal succeeded,代表导航成功 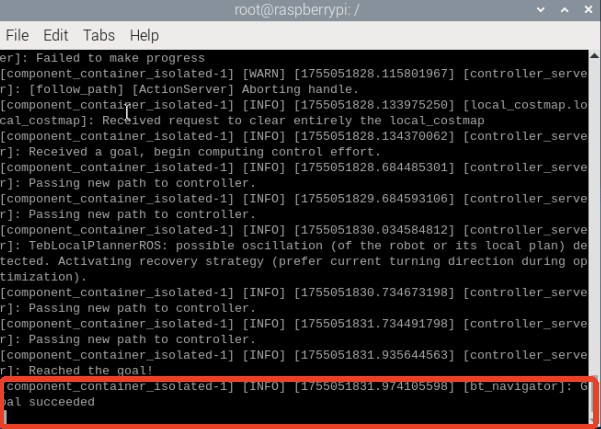 ### 4、查看节点通讯图 终端输入:`ros2 run rqt_graph rqt_graph` 如果一开始没有显示,选择【Nodes/Topics(all)】,然后点击左上角的刷新按钮,原图尺寸过大,可以在本节课程文件夹下查看  ### 5、查看TF树 终端输入:`ros2 run rqt_tf_tree rqt_tf_tree` 如果一开始没有显示,点击左上角的刷新符号刷新页面,原图尺寸过大,可以在本节课程文件夹下查看  ### 6、导航讲解 #### 6.1 导航流程核心步骤 ##### 6.1.1 阶段 1:系统初始化与地图加载 * **地图获取** * 从`map_server`加载预构建的栅格地图 * 地图包含静态障碍物信息,作为导航的基础环境模型。 **代价地图初始化** * **全局代价地图(Global Costmap)**:基于静态地图,用于全局路径规划。 * **局部代价地图(Local Costmap)**:实时融合激光雷达的`scan`话题用于动态障碍物避障。 ##### 6.1.2 阶段 2:传感器数据处理与环境感知 **传感器数据接入** * 激光雷达(`/scan`)、IMU(`/imu/data`)、里程计(`/odom`)数据通过 ROS 话题输入。 * **代价地图更新** * 局部代价地图实时更新动态障碍物信息,每个栅格根据传感器数据计算占用概率和代价(如距离障碍物越近,代价越高)。 * 膨胀处理(Inflation):将障碍物边缘扩展,避免机器人过于靠近障碍物。 * ##### 6.1.3 阶段 3:路径规划(全局规划与局部规划) **全局路径规划** * 输入:起点(机器人当前位姿)、终点(目标位姿)、全局代价地图。 * 规划器算法Dijkstra生成从起点到终点的最优路径(一系列离散的坐标点)。 **局部路径规划与跟踪** 局部规划器DWBLocalPlanner根据全局路径和局部代价地图,生成机器人可执行的短时间内的控制指令。 ##### 6.1.4 阶段 4:控制执行与行为决策 **控制器输出** * 控制器将局部路径转换为机器人的线速度(`linear.x`)和角速度(`angular.z`),通过`/cmd_vel`话题发布。 * 速度平滑处理:避免机器人运动突变,提高稳定性。 **行为树决策流程** 行为树定义导航任务的优先级和状态转移逻辑,典型流程: 1. **检查目标是否可达**:若全局规划失败,触发 “恢复行为”(如重新规划)。 2. **执行局部避障**:当局部代价地图检测到障碍物时,暂时偏离全局路径。 3. **到达目标**:当机器人位姿与目标位姿误差小于阈值时,任务完成。 **恢复行为机制** 当导航遇到异常(如路径被完全阻塞),触发预设的恢复策略(如旋转搜索新路径、后退重新规划)。 #### 6.2 关键技术原理 ##### 6.2.1 代价地图 * **概率栅格表示**:每个栅格存储占用概率(0-1),通过传感器数据更新(如激光雷达的射线检测)。 * **多层代价叠加**:静态代价(地图障碍物)+ 动态代价(实时传感器检测的障碍物)+ 膨胀代价(安全距离)。 Costmap是机器人收集传感器信息建立和更新的二维或三维地图,可以从下图简要了解。  上图中,红色部分代表costmap中的障碍物,蓝色部分表示通过机器人内切圆半径膨胀出的障碍,红色多边形是footprint(机器人轮廓的垂直投影)。为了避免碰撞,footprint不应该和红色部分有交叉,机器人中心不应该与蓝色部分有交叉。 ROS的代价地图(costmap)采用网格(grid)形式,每个网格的值(cell cost)从0~255。分成三种状态:被占用(有障碍)、自由区域(无障碍)、未知区域; 具体状态和值对应有下图: 上图可分为五部分,其中红色多边形区域为机器人的轮廓: * Lethal(致命的):机器人的中心与该网格的中心重合,此时机器人必然与障碍物冲突。 * Inscribed(内切):网格的外切圆与机器人的轮廓内切,此时机器人也必然与障碍物冲突。 * Possibly circumscribed(外切):网格的外切圆与机器人的轮廓外切,此时机器人相当于靠在障碍物附近,所以不一定冲突。 * Freespace(自由空间):没有障碍物的空间。 * Unknown(未知):未知的空间。 全局代价地图:  局部代价地图: 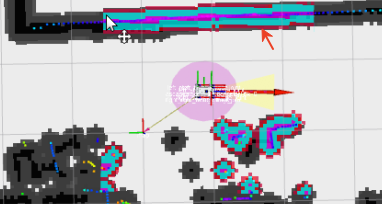 ##### 6.2.2 AMCL定位算法 AMCL(自适应蒙特卡洛定位) 是用于2D移动机器人的概率定位系统,它实现了自适应(或KLD采样)蒙特卡洛定位方法,可以根据已有地图使用粒子滤波器推算机器人位置。 如下图所示,如果里程计没有误差,完美的情况下,我们可以直接使用里程计信息(上半图)推算出机器人(base\_frame)相对里程计坐标系的位置。但现实情况,里程计存在漂移以及无法忽略的累计误差,所以AMCL采用下半图的方法,即先根据里程计信息初步定位base\_frame,然后通过测量模型得到base\_frame相对于map\_frame(全局地图坐标系),也就知道了机器人在地图中的位姿。(注意,这里虽然估计的是base到map的转换,但最后发布的是map到odom的转换,可以理解为里程计的漂移。) 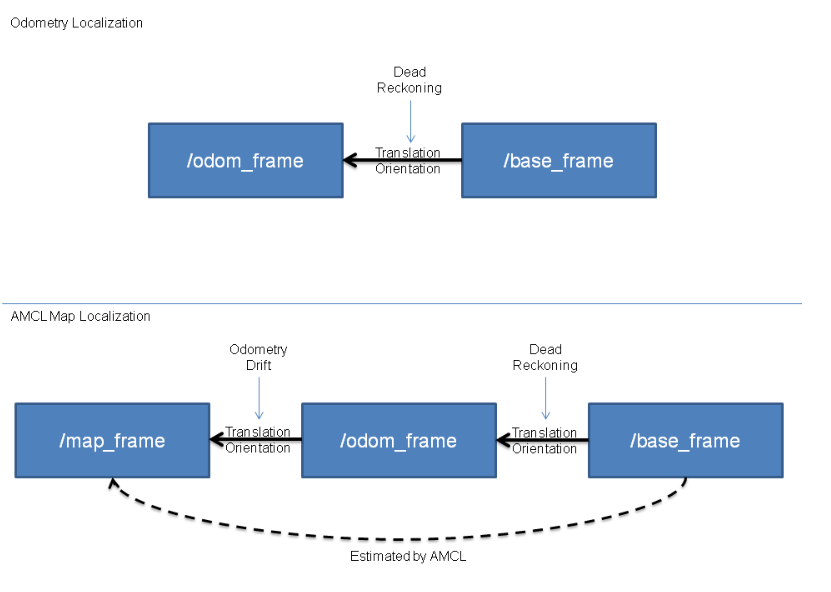 在机器人导航时的TF树中,其中map(地图坐标系)—odom(里程计坐标系)之间坐标变换由AMCL定位算法发布,而odom(里程计坐标系)—besel_footprint(机器人底盘中心点投影坐标系)之间的坐标变换由**robot\_localization**功能包下的**ekf_filter_node**节点发布,其作用是发布IMU传感器和编码器原始里程融合后的里程计信息。 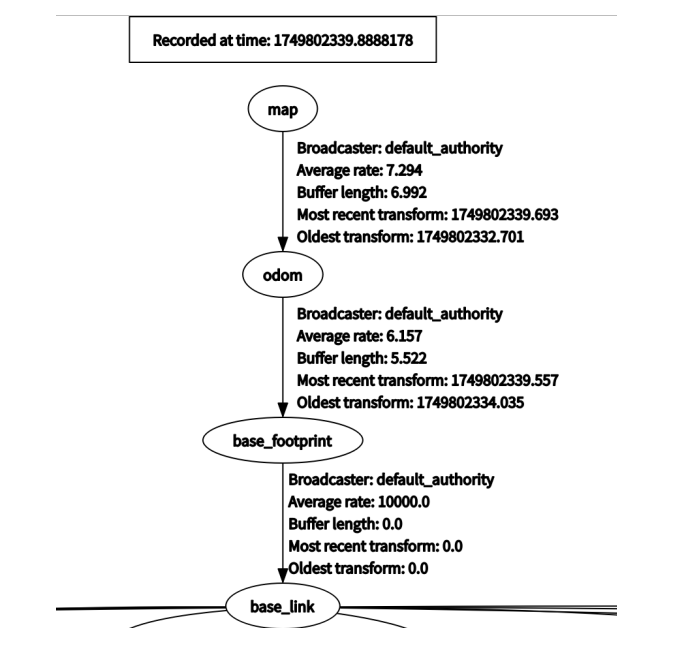 在前边查看节点通信图中,我们可找到关于ekf_filter_node的通信数据流 其中/driver_node节点为机器人底盘节点,发布了**/imu/data_raw**(IMU传感器原始数据)、**/odom_raw**(编码器原始里程计数据) imu_filter节点订阅了机器人底盘发布的**/imu/data_raw**(IMU传感器原始数据),imu_filter节点对IMU传感器原始数据进行滤波后发布/imu/data话题 **ekf_filter_node**节点订阅了/**odom**话题和**/imu/data**话题数据,将多传感器数据融合后发布**/odom**话题 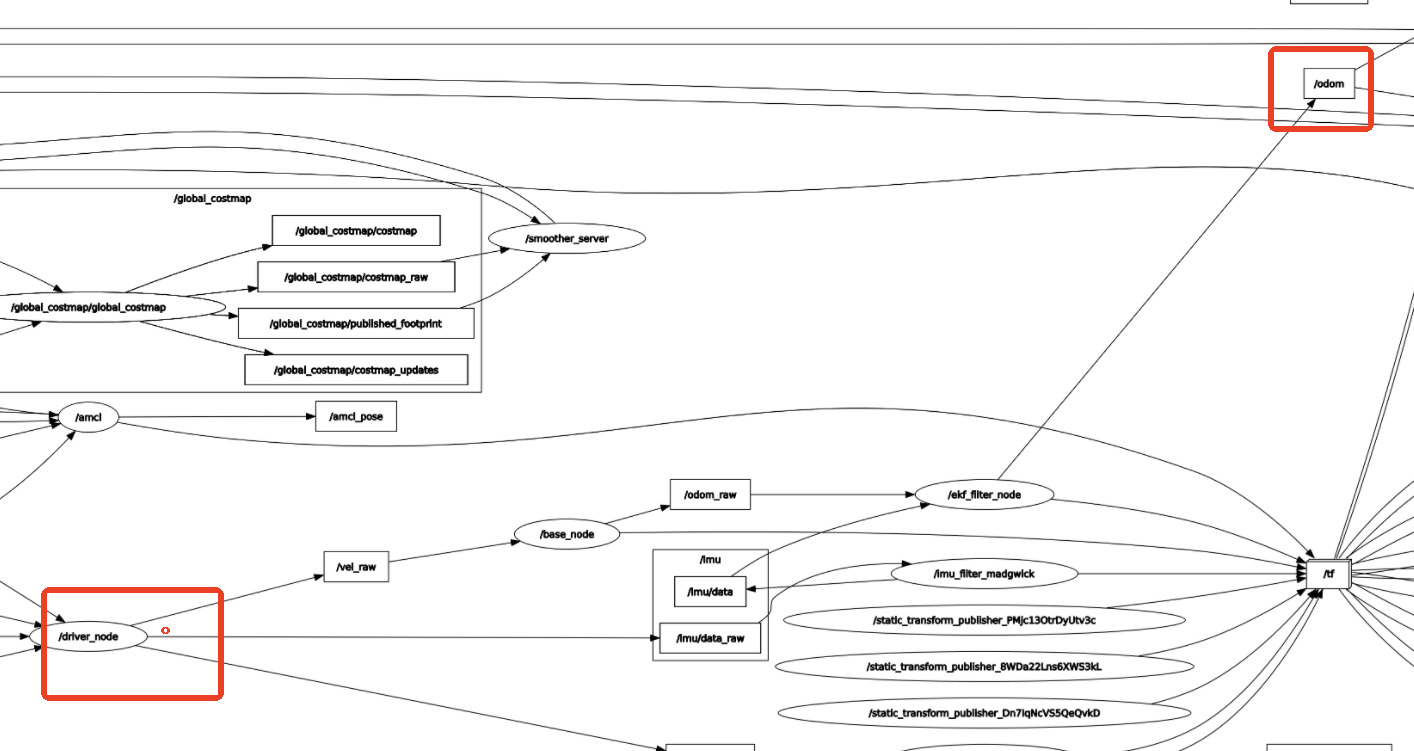 #### 6.3 路径规划 ##### 6.3.1 全局路径规划 全局路径规划作用是在已知环境地图中,根据起点和终点计算一条最优或可行的全局路径,不考虑实时障碍物,以全局最优为目标,计算从起点到终点的路径,如下图所示,箭头连成的路径即为全局路径 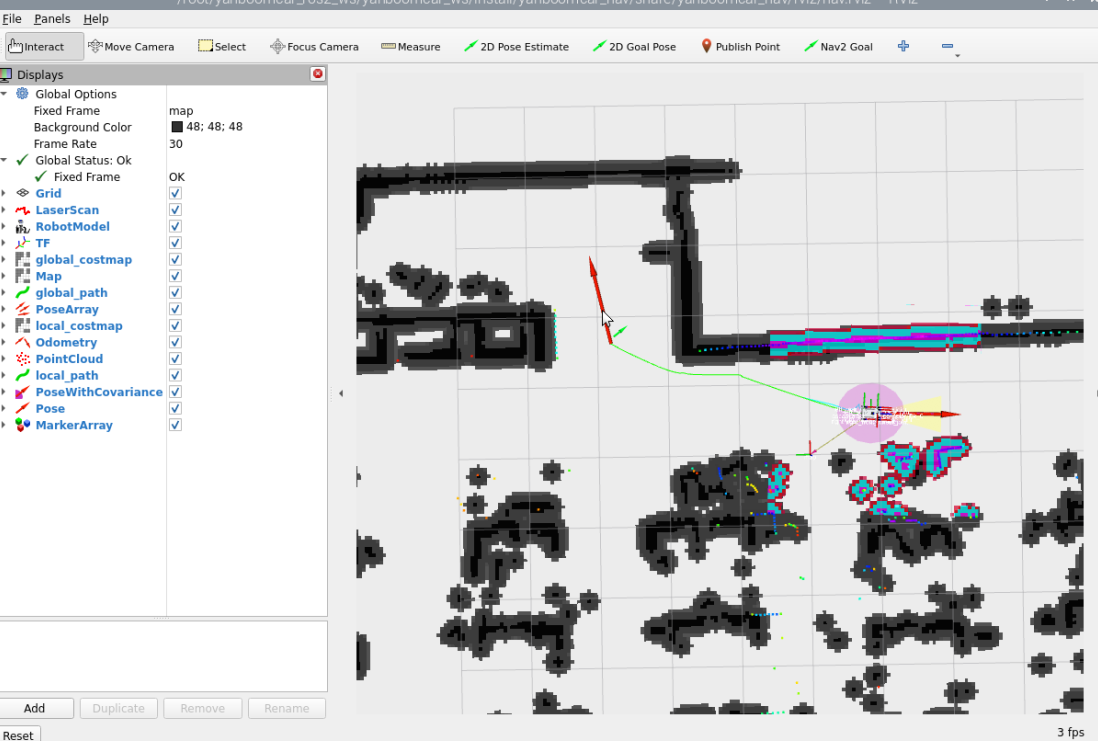 ##### 6.3.2 局部路径规划 局部路径规划作用是在机器人运动过程中,根据实时激光雷达传感器数据动态调整路径,避开障碍物(障碍物会在代价地图中显示)。如下图所是,蓝色路径为局部路径。 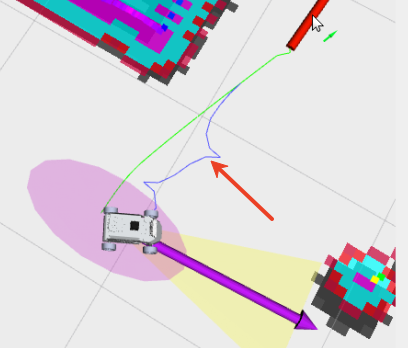 #### 6.4 导航参数配置 **jetson nano、树莓派需要先进入docker** 配置文件路径: ` ~/yahboomcar_ros2_ws/yahboomcar_ws/src/yahboomcar_nav/params/teb_nav_params.yaml ` TEB算法导航功能默认配置参数如下: ``` amcl: ros__parameters: use_sim_time: False # 是否使用仿真时间 alpha1: 0.1 # 里程计旋转误差模型参数 alpha2: 0.1 # 里程计平移误差模型参数 alpha3: 0.3 # 里程计平移误差模型参数 alpha4: 0.3 # 里程计旋转误差模型参数 alpha5: 0.1 # 里程计旋转误差模型参数 base_frame_id: "base_footprint" # 机器人基座坐标系 beam_skip_distance: 0.5 # 光束跳过距离阈值 beam_skip_error_threshold: 0.9 # 光束跳过误差阈值 beam_skip_threshold: 0.3 # 光束跳过阈值 do_beamskip: false # 是否启用光束跳过 global_frame_id: "map" # 全局坐标系 lambda_short: 0.1 # 激光模型短距离权重 laser_likelihood_max_dist: 2.0 # 激光似然场最大距离 laser_max_range: 100.0 # 激光最大有效距离 laser_min_range: -1.0 # 激光最小有效距离 laser_model_type: "likelihood_field" # 激光模型类型(似然场) max_beams: 50 # 每次处理的最大激光束数 max_particles: 4000 # 最大粒子数 min_particles: 1000 # 最小粒子数 odom_frame_id: "odom" # 里程计坐标系 pf_err: 0.05 # 粒子滤波器误差阈值 pf_z: 0.99 # 粒子滤波器权重指数 recovery_alpha_fast: 0.0 # 快速恢复参数 recovery_alpha_slow: 0.0 # 慢速恢复参数 resample_interval: 1 # 重采样间隔 robot_model_type: "nav2_amcl::DifferentialMotionModel" # 机器人运动模型 save_pose_rate: 0.5 # 保存位姿的速率 sigma_hit: 0.2 # 激光模型标准差 tf_broadcast: true # 是否广播TF变换 transform_tolerance: 1.0 # TF变换容差 update_min_a: 0.15 # 最小角度变化触发更新 update_min_d: 0.15 # 最小距离变化触发更新 z_hit: 0.5 # 激光模型命中权重 z_max: 0.05 # 激光模型最大距离权重 z_rand: 0.5 # 激光模型随机权重 z_short: 0.05 # 激光模型短距离权重 scan_topic: scan # 激光扫描话题 amcl_map_client: ros__parameters: use_sim_time: False # 是否使用仿真时间 amcl_rclcpp_node: ros__parameters: use_sim_time: False # 是否使用仿真时间 bt_navigator: ros__parameters: use_sim_time: False # 是否使用仿真时间 global_frame: map # 全局坐标系 robot_base_frame: base_footprint # 机器人基座坐标系 odom_topic: /odom # 里程计话题 plugin_lib_names: # 行为树插件库列表 - nav2_compute_path_to_pose_action_bt_node - nav2_compute_path_through_poses_action_bt_node # ...(其他行为树节点插件) bt_navigator_rclcpp_node: ros__parameters: use_sim_time: False # 是否使用仿真时间 controller_server: ros__parameters: use_sim_time: False # 是否使用仿真时间 controller_frequency: 30.0 # 控制器频率 min_x_velocity_threshold: 0.001 # X方向最小速度阈值 min_y_velocity_threshold: 0.0 # Y方向最小速度阈值 min_theta_velocity_threshold: 0.001 # 旋转最小速度阈值 progress_checker_plugin: "progress_checker" # 进度检查器插件 goal_checker_plugin: "goal_checker" # 目标检查器插件 controller_plugins: ["FollowPath"] # 控制器插件列表 # 进度检查器参数 progress_checker: plugin: "nav2_controller::SimpleProgressChecker" # 简单进度检查器 required_movement_radius: 0.3 # 要求移动半径 movement_time_allowance: 3.5 # 移动时间容限 # 目标检查器参数 goal_checker: plugin: "nav2_controller::SimpleGoalChecker" # 简单目标检查器 xy_goal_tolerance: 0.25 # XY位置容差 yaw_goal_tolerance: 0.25 # 航向角容差 stateful: True # 是否保持状态 # TEB局部规划器参数 FollowPath: plugin: "teb_local_planner::TebLocalPlannerROS" # TEB局部规划器 footprint_model.type: circular # 机器人足迹模型(圆形) footprint_model.radius: 0.1 # 机器人半径 min_obstacle_dist: 0.1 # 最小障碍物距离 inflation_dist: 0.1 # 膨胀距离 costmap_converter_plugin: "costmap_converter::CostmapToPolygonsDBSMCCH" # 代价地图转换插件 costmap_converter_spin_thread: True # 转换器是否使用独立线程 costmap_converter_rate: 20 # 转换器频率 enable_homotopy_class_planning: True # 启用同伦类规划 enable_multithreading: True # 启用多线程 optimization_verbose: False # 优化过程是否详细输出 teb_autoresize: True # 自动调整轨迹点数量 min_samples: 3 # 最小轨迹点数 max_samples: 20 # 最大轨迹点数 max_global_plan_lookahead_dist: 1.0 # 全局规划前瞻距离 visualize_hc_graph: True # 是否可视化同伦图 max_vel_x: 0.26 # 最大线速度 min_vel_x: -0.26 # 最小线速度(后退) max_vel_theta: 3.0 # 最大角速度 min_vel_theta: -3.0 # 最小角速度 acc_lim_x: 2.5 # X方向加速度限制 acc_lim_theta: 3.2 # 旋转加速度限制 costmap_converter: ros__parameters: use_sim_time: False # 是否使用仿真时间 controller_server_rclcpp_node: ros__parameters: use_sim_time: False # 是否使用仿真时间 local_costmap: local_costmap: ros__parameters: use_sim_time: False # 是否使用仿真时间 update_frequency: 5.0 # 更新频率 publish_frequency: 2.0 # 发布频率 global_frame: odom # 全局坐标系 robot_base_frame: base_footprint # 机器人基座坐标系 rolling_window: true # 是否使用滚动窗口 width: 3 # 代价地图宽度(米) height: 3 # 代价地图高度(米) resolution: 0.05 # 分辨率(米/像素) robot_radius: 0.1 # 机器人半径 plugins: ["obstacle_layer", "voxel_layer", "inflation_layer"] # 图层插件 inflation_layer: # 膨胀层参数 plugin: "nav2_costmap_2d::InflationLayer" # 膨胀层插件 cost_scaling_factor: 5.0 # 代价缩放因子 inflation_radius: 0.11 # 膨胀半径 obstacle_layer: # 障碍物层参数 plugin: "nav2_costmap_2d::ObstacleLayer" # 障碍物层插件 enabled: True # 是否启用 observation_sources: scan # 观测源(激光) scan: # 激光参数 topic: /scan # 激光话题 max_obstacle_height: 2.0 # 最大障碍物高度 obstacle_min_range: 0.1 # 最小障碍物距离 clearing: True # 是否用于清除空间 marking: True # 是否用于标记障碍 data_type: "LaserScan" # 数据类型 voxel_layer: # 体素层参数 plugin: "nav2_costmap_2d::VoxelLayer" # 体素层插件 enabled: True # 是否启用 publish_voxel_map: True # 是否发布体素地图 origin_z: 0.0 # Z轴原点 z_resolution: 0.2 # Z轴分辨率 z_voxels: 10 # Z轴体素数 max_obstacle_height: 2.0 # 最大障碍物高度 mark_threshold: 0 # 标记阈值 observation_sources: pointcloud # 观测源(点云) pointcloud: # 点云参数 topic: /intel_realsense_r200_depth/points # 点云话题 max_obstacle_height: 2.0 # 最大障碍物高度 clearing: True # 是否用于清除空间 marking: True # 是否用于标记障碍 data_type: "PointCloud2" # 数据类型 static_layer: # 静态层参数 map_subscribe_transient_local: True # 使用瞬态本地订阅 always_send_full_costmap: True # 总是发送完整代价地图 local_costmap_client: ros__parameters: use_sim_time: False # 是否使用仿真时间 local_costmap_rclcpp_node: ros__parameters: use_sim_time: False # 是否使用仿真时间 global_costmap: global_costmap: ros__parameters: use_sim_time: False # 是否使用仿真时间 footprint_padding: 0.03 # 足迹填充 update_frequency: 1.0 # 更新频率 publish_frequency: 1.0 # 发布频率 global_frame: map # 全局坐标系 robot_base_frame: base_footprint # 机器人基座坐标系 robot_radius: 0.1 # 机器人半径 resolution: 0.05 # 分辨率 plugins: ["static_layer", "obstacle_layer", "voxel_layer", "inflation_layer"] # 图层插件 obstacle_layer: # 障碍物层参数 plugin: "nav2_costmap_2d::ObstacleLayer" # 障碍物层插件 enabled: True # 是否启用 observation_sources: scan # 观测源(激光) footprint_clearing_enabled: true # 是否启用足迹清除 max_obstacle_height: 2.0 # 最大障碍物高度 combination_method: 1 # 组合方法 scan: # 激光参数 topic: /scan # 激光话题 obstacle_range: 3.0 # 障碍物检测范围 obstacle_min_range: 0.3 # 最小障碍物距离 raytrace_range: 4.0 # 光线追踪范围 max_obstacle_height: 1.0 # 最大障碍物高度 min_obstacle_height: 0.0 # 最小障碍物高度 clearing: True # 是否用于清除空间 marking: True # 是否用于标记障碍 data_type: "LaserScan" # 数据类型 inf_is_valid: false # 无限距离是否有效 voxel_layer: # 体素层参数 plugin: "nav2_costmap_2d::VoxelLayer" # 体素层插件 enabled: True # 是否启用 footprint_clearing_enabled: true # 是否启用足迹清除 max_obstacle_height: 2.0 # 最大障碍物高度 publish_voxel_map: True # 是否发布体素地图 origin_z: 0.0 # Z轴原点 z_resolution: 0.05 # Z轴分辨率 z_voxels: 16 # Z轴体素数 unknown_threshold: 15 # 未知区域阈值 mark_threshold: 0 # 标记阈值 observation_sources: pointcloud # 观测源(点云) combination_method: 1 # 组合方法 pointcloud: # 点云参数 topic: /intel_realsense_r200_depth/points # 点云话题 max_obstacle_height: 2.0 # 最大障碍物高度 min_obstacle_height: 0.0 # 最小障碍物高度 obstacle_range: 2.5 # 障碍物检测范围 raytrace_range: 3.0 # 光线追踪范围 clearing: True # 是否用于清除空间 marking: True # 是否用于标记障碍 data_type: "PointCloud2" # 数据类型 static_layer: # 静态层参数 plugin: "nav2_costmap_2d::StaticLayer" # 静态层插件 map_subscribe_transient_local: True # 使用瞬态本地订阅 enabled: true # 是否启用 subscribe_to_updates: true # 是否订阅更新 transform_tolerance: 0.1 # 变换容差 inflation_layer: # 膨胀层参数 plugin: "nav2_costmap_2d::InflationLayer" # 膨胀层插件 enabled: true # 是否启用 cost_scaling_factor: 5.0 # 代价缩放因子 inflation_radius: 0.11 # 膨胀半径 inflate_unknown: false # 是否膨胀未知区域 inflate_around_unknown: true # 是否在未知区域周围膨胀 always_send_full_costmap: True # 总是发送完整代价地图 global_costmap_client: ros__parameters: use_sim_time: False # 是否使用仿真时间 global_costmap_rclcpp_node: ros__parameters: use_sim_time: False # 是否使用仿真时间 map_server: ros__parameters: use_sim_time: False # 是否使用仿真时间 yaml_filename: "yahboomcar.yaml" # 地图YAML文件路径 map_saver: ros__parameters: use_sim_time: False # 是否使用仿真时间 save_map_timeout: 5.0 # 保存地图超时时间 free_thresh_default: 0.25 # 空闲阈值默认值 occupied_thresh_default: 0.65 # 占用阈值默认值 map_subscribe_transient_local: True # 使用瞬态本地订阅 planner_server: ros__parameters: expected_planner_frequency: 20.0 # 期望规划器频率 use_sim_time: False # 是否使用仿真时间 planner_plugins: ["GridBased"] # 规划器插件列表 GridBased: plugin: "nav2_navfn_planner/NavfnPlanner" # Navfn规划器 tolerance: 0.5 # 目标点容差 use_astar: false # 是否使用A*算法 allow_unknown: true # 是否允许未知区域 planner_server_rclcpp_node: ros__parameters: use_sim_time: False # 是否使用仿真时间 behavior_server: ros__parameters: costmap_topic: local_costmap/costmap_raw # 代价地图话题 footprint_topic: local_costmap/published_footprint # 足迹话题 cycle_frequency: 10.0 # 行为执行频率 behavior_plugins: ["backup"] # 行为插件列表 backup: # 后退行为参数 plugin: "nav2_behaviors/BackUp" # 后退行为插件 backup_speed: -1.0 # 后退速度 backup_duration: 1.5 # 后退持续时间 simulate_ahead_time: 2.0 # 模拟提前时间 global_frame: odom # 全局坐标系 robot_base_frame: base_footprint # 机器人基座坐标系 transform_timeout: 0.1 # 变换超时 use_sim_time: False # 是否使用仿真时间 simulate_ahead_time: 2.0 # 模拟提前时间 max_rotational_vel: 1.0 # 最大旋转速度 min_rotational_vel: 0.4 # 最小旋转速度 rotational_acc_lim: 3.2 # 旋转加速度限制 robot_state_publisher: ros__parameters: use_sim_time: False # 是否使用仿真时间 waypoint_follower: ros__parameters: loop_rate: 20 # 循环频率 stop_on_failure: false # 失败时是否停止 waypoint_task_executor_plugin: "wait_at_waypoint" # 航点任务执行器插件 wait_at_waypoint: # 航点等待参数 plugin: "nav2_waypoint_follower::WaitAtWaypoint" # 航点等待插件 enabled: True # 是否启用 waypoint_pause_duration: 200 # 航点暂停时间(毫秒) dwa算法导航功能默认配置参数如下: amcl: ros__parameters: use_sim_time: False # 是否使用仿真时间 (Gazebo等) alpha1: 0.2 # 运动模型中的平移噪声参数 (x方向) alpha2: 0.2 # 运动模型中的平移噪声参数 (y方向) alpha3: 0.2 # 运动模型中的旋转噪声参数 alpha4: 0.2 # 运动模型中的平移噪声参数 (末端旋转) alpha5: 0.2 # 运动模型中的旋转噪声参数 (末端旋转) base_frame_id: "base_footprint" # 机器人基座坐标系 beam_skip_distance: 0.5 # 光束跳过距离(米) beam_skip_error_threshold: 0.9 # 光束跳过错误阈值 beam_skip_threshold: 0.3 # 光束跳过阈值 do_beamskip: false # 是否启用光束跳过功能 global_frame_id: "map" # 全局地图坐标系 lambda_short: 0.1 # 短距离测量的权重 laser_likelihood_max_dist: 2.0 # 激光似然场最大距离(米) laser_max_range: 100.0 # 激光最大测距范围(米) laser_min_range: -1.0 # 激光最小测距范围(米) laser_model_type: "likelihood_field" # 激光模型类型 (似然场模型) max_beams: 50 # 每次更新使用的最大激光束数 max_particles: 4000 # 最大粒子数 min_particles: 1000 # 最小粒子数 odom_frame_id: "odom" # 里程计坐标系 pf_err: 0.05 # 粒子滤波器错误阈值 pf_z: 0.99 # 粒子滤波器z值 recovery_alpha_fast: 0.0 # 快速恢复alpha值 recovery_alpha_slow: 0.0 # 慢速恢复alpha值 resample_interval: 1 # 重采样间隔 robot_model_type: "nav2_amcl::DifferentialMotionModel" # 机器人运动模型 (差速驱动) save_pose_rate: 0.5 # 保存位姿的速率(Hz) sigma_hit: 0.2 # 激光测量噪声标准差 tf_broadcast: true # 是否广播TF变换 transform_tolerance: 1.0 # TF变换容忍时间(秒) update_min_a: 0.2 # 最小角度变化触发更新(弧度) update_min_d: 0.25 # 最小距离变化触发更新(米) z_hit: 0.5 # 命中测量的权重 z_max: 0.05 # 最大范围测量的权重 z_rand: 0.5 # 随机测量的权重 z_short: 0.05 # 短距离测量的权重 scan_topic: scan # 激光扫描数据的话题名称 # 初始位置设置 (示例,当前被注释) # set_initial_pose: true # initial_pose: # x: 0.0 # y: 0.0 # z: 0.0 # yaw: 0.0 # AMCL相关组件的参数 amcl_map_client: ros__parameters: use_sim_time: False amcl_rclcpp_node: ros__parameters: use_sim_time: False # 行为树导航器配置 bt_navigator: ros__parameters: use_sim_time: False global_frame: map # 全局坐标系 robot_base_frame: base_footprint # 机器人基座坐标系 odom_topic: /odom # 里程计数据的话题 default_bt_xml_filename: "navigate_to_pose_w_replanning_and_recovery.xml" # 默认行为树文件 plugin_lib_names: # 行为树插件库列表 - nav2_compute_path_to_pose_action_bt_node - nav2_compute_path_through_poses_action_bt_node - nav2_smooth_path_action_bt_node - nav2_follow_path_action_bt_node - nav2_spin_action_bt_node - nav2_wait_action_bt_node - nav2_assisted_teleop_action_bt_node - nav2_back_up_action_bt_node - nav2_drive_on_heading_bt_node - nav2_clear_costmap_service_bt_node - nav2_is_stuck_condition_bt_node - nav2_goal_reached_condition_bt_node - nav2_goal_updated_condition_bt_node - nav2_globally_updated_goal_condition_bt_node - nav2_is_path_valid_condition_bt_node - nav2_initial_pose_received_condition_bt_node - nav2_reinitialize_global_localization_service_bt_node - nav2_rate_controller_bt_node - nav2_distance_controller_bt_node - nav2_speed_controller_bt_node - nav2_truncate_path_action_bt_node - nav2_truncate_path_local_action_bt_node - nav2_goal_updater_node_bt_node - nav2_recovery_node_bt_node - nav2_pipeline_sequence_bt_node - nav2_round_robin_node_bt_node - nav2_transform_available_condition_bt_node - nav2_time_expired_condition_bt_node - nav2_path_expiring_timer_condition - nav2_distance_traveled_condition_bt_node - nav2_single_trigger_bt_node - nav2_goal_updated_controller_bt_node - nav2_is_battery_low_condition_bt_node - nav2_navigate_through_poses_action_bt_node - nav2_navigate_to_pose_action_bt_node - nav2_remove_passed_goals_action_bt_node - nav2_planner_selector_bt_node - nav2_controller_selector_bt_node - nav2_goal_checker_selector_bt_node - nav2_controller_cancel_bt_node - nav2_path_longer_on_approach_bt_node - nav2_wait_cancel_bt_node - nav2_spin_cancel_bt_node - nav2_back_up_cancel_bt_node - nav2_assisted_teleop_cancel_bt_node - nav2_drive_on_heading_cancel_bt_node - nav2_is_battery_charging_condition_bt_node # 行为树导航器节点参数 bt_navigator_rclcpp_node: ros__parameters: use_sim_time: False # 控制器服务器配置 controller_server: ros__parameters: use_sim_time: False controller_frequency: 10.0 # 控制器运行频率(Hz) min_x_velocity_threshold: 0.001 # X方向最小速度阈值(m/s) min_y_velocity_threshold: 0.5 # Y方向最小速度阈值(m/s) min_theta_velocity_threshold: 0.001 # 旋转最小速度阈值(rad/s) controller_plugins: ["FollowPath"] # 使用的控制器插件列表 # DWB控制器参数 FollowPath: plugin: "dwb_core::DWBLocalPlanner" # 控制器类型 debug_trajectory_details: True # 是否调试轨迹细节 min_vel_x: 0.0 # 最小X方向速度(m/s) min_vel_y: 0.0 # 最小Y方向速度(m/s) max_vel_x: 0.3 # 最大X方向速度(m/s) max_vel_y: 0.0 # 最大Y方向速度(m/s) max_vel_theta: 0.6 # 最大旋转速度(rad/s) min_speed_xy: 0.0 # 最小XY平面速度(m/s) max_speed_xy: 0.3 # 最大XY平面速度(m/s) min_speed_theta: 0.0 # 最小旋转速度(rad/s) acc_lim_x: 0.25 # X方向加速度限制(m/s²) acc_lim_y: 0.0 # Y方向加速度限制(m/s²) acc_lim_theta: 0.4 # 旋转加速度限制(rad/s²) decel_lim_x: -0.25 # X方向减速度限制(m/s²) decel_lim_y: 0.0 # Y方向减速度限制(m/s²) decel_lim_theta: -0.4 # 旋转减速度限制(rad/s²) vx_samples: 20 # X方向速度采样数 vy_samples: 0 # Y方向速度采样数 vtheta_samples: 40 # 旋转速度采样数 sim_time: 1.5 # 轨迹模拟时间(s) linear_granularity: 0.05 # 线速度粒度(m/s) angular_granularity: 0.025 # 角速度粒度(rad/s) transform_tolerance: 0.2 # TF变换容忍时间(s) xy_goal_tolerance: 0.15 # XY目标容差(m) trans_stopped_velocity: 0.25 # 停止时的平移速度(m/s) short_circuit_trajectory_evaluation: True # 是否使用短路轨迹评估 stateful: True # 是否保持状态 critics: # 轨迹评估器列表 - "RotateToGoal" - "Oscillation" - "BaseObstacle" - "GoalAlign" - "PathAlign" - "PathDist" - "GoalDist" BaseObstacle.scale: 0.02 # 基础障碍物评估器缩放因子 PathAlign.scale: 16.0 # 路径对齐评估器缩放因子 PathAlign.forward_point_distance: 0.1 # 路径对齐前视点距离(m) GoalAlign.scale: 24.0 # 目标对齐评估器缩放因子 GoalAlign.forward_point_distance: 0.1 # 目标对齐前视点距离(m) PathDist.scale: 32.0 # 路径距离评估器缩放因子 GoalDist.scale: 24.0 # 目标距离评估器缩放因子 RotateToGoal.scale: 64.0 # 旋转到目标评估器缩放因子 RotateToGoal.slowing_factor: 5.0 # 旋转到目标减速因子 RotateToGoal.lookahead_time: -1.0 # 旋转到目标前视时间(s) # 控制器服务器节点参数 controller_server_rclcpp_node: ros__parameters: use_sim_time: False # 局部代价地图配置 local_costmap: local_costmap: ros__parameters: update_frequency: 5.0 # 更新频率(Hz) publish_frequency: 2.0 # 发布频率(Hz) global_frame: odom # 全局坐标系 robot_base_frame: base_footprint # 机器人基座坐标系 use_sim_time: False rolling_window: true # 是否使用滚动窗口 width: 3 # 地图宽度(m) height: 3 # 地图高度(m) resolution: 0.05 # 分辨率(m/像素) robot_radius: 0.1 # 机器人半径(m) plugins: ["obstacle_layer", "inflation_layer"] # 使用的图层 inflation_layer: plugin: "nav2_costmap_2d::InflationLayer" # 膨胀层插件 inflation_radius: 0.22 # 膨胀半径(m) cost_scaling_factor: 6.0 # 成本缩放因子 obstacle_layer: plugin: "nav2_costmap_2d::ObstacleLayer" # 障碍物层插件 enabled: True # 是否启用障碍物层 observation_sources: scan # 观测源 scan: topic: /scan # 激光扫描话题 max_obstacle_height: 2.0 # 最大障碍物高度(m) obstacle_min_range: 0.1 # 障碍物最小范围(m) clearing: True # 是否清除障碍物 marking: True # 是否标记障碍物 data_type: "LaserScan" # 数据类型 static_layer: map_subscribe_transient_local: True # 静态地图订阅传输方式 always_send_full_costmap: True # 是否始终发送完整代价地图 # 局部代价地图客户端参数 local_costmap_client: ros__parameters: use_sim_time: False # 局部代价地图节点参数 local_costmap_rclcpp_node: ros__parameters: use_sim_time: False # 全局代价地图配置 global_costmap: global_costmap: ros__parameters: footprint_padding: 0.03 # 机器人轮廓填充(m) update_frequency: 1.0 # 更新频率(Hz) publish_frequency: 1.0 # 发布频率(Hz) global_frame: map # 全局坐标系 robot_base_frame: base_footprint # 机器人基座坐标系 use_sim_time: False robot_radius: 0.1 # 机器人半径(m) resolution: 0.05 # 分辨率(m/像素) plugins: ["static_layer", "obstacle_layer", "inflation_layer"] # 使用的图层 obstacle_layer: plugin: "nav2_costmap_2d::ObstacleLayer" # 障碍物层插件 enabled: True # 是否启用障碍物层 observation_sources: scan # 观测源 scan: topic: /scan # 激光扫描话题 raytrace_range: 3.0 # 光线追踪范围(m) obstacle_min_range: 0.1 # 障碍物最小范围(m) max_obstacle_height: 2.0 # 最大障碍物高度(m) clearing: True # 是否清除障碍物 marking: True # 是否标记障碍物 data_type: "LaserScan" # 数据类型 static_layer: plugin: "nav2_costmap_2d::StaticLayer" # 静态层插件 map_subscribe_transient_local: True # 静态地图订阅传输方式 inflation_layer: plugin: "nav2_costmap_2d::InflationLayer" # 膨胀层插件 cost_scaling_factor: 6.0 # 成本缩放因子 inflation_radius: 0.22 # 膨胀半径(m) always_send_full_costmap: True # 是否始终发送完整代价地图 # 全局代价地图客户端参数 global_costmap_client: ros__parameters: use_sim_time: False # 全局代价地图节点参数 global_costmap_rclcpp_node: ros__parameters: use_sim_time: False # 地图服务器配置 map_server: ros__parameters: use_sim_time: False yaml_filename: "yahboomcar.yaml" # 地图文件路径 # 地图保存器配置 map_saver: ros__parameters: use_sim_time: False save_map_timeout: 5000 # 保存地图超时时间(ms) free_thresh_default: 0.25 # 自由空间阈值 occupied_thresh_default: 0.65 # 占用空间阈值 # 规划器服务器配置 planner_server: ros__parameters: expected_planner_frequency: 20.0 # 预期规划器频率(Hz) use_sim_time: False planner_plugins: ["GridBased"] # 使用的规划器插件 GridBased: plugin: "nav2_navfn_planner/NavfnPlanner" # 规划器类型 tolerance: 0.5 # 目标点容差(m) use_astar: false # 是否使用A*算法 allow_unknown: true # 是否允许在未知区域规划 # 规划器服务器节点参数 planner_server_rclcpp_node: ros__parameters: use_sim_time: False # 行为服务器配置 behavior_server: ros__parameters: costmap_topic: local_costmap/costmap_raw # 代价地图话题 footprint_topic: local_costmap/published_footprint # 机器人轮廓话题 cycle_frequency: 10.0 # 行为执行频率(Hz) behavior_plugins: ["spin", "backup", "wait"] # 行为插件列表 spin: plugin: "nav2_behaviors/Spin" # 旋转行为插件 spin_type: "SPIN_IN_PLACE" # 旋转类型 (原地旋转) rotation_velocity: 1.0 # 旋转速度(rad/s) max_rotational_vel: 1.0 # 最大旋转速度(rad/s) min_rotational_vel: 0.4 # 最小旋转速度(rad/s) rotational_acc_lim: 3.2 # 旋转加速度限制(rad/s²) backup: plugin: "nav2_behaviors/BackUp" # 后退行为插件 backup_speed: -0.2 # 后退速度(m/s) backup_duration: 2.0 # 后退持续时间(s) simulate_ahead_time: 2.0 # 模拟提前时间(s) wait: plugin: "nav2_behaviors/Wait" # 等待行为插件 wait_duration: 1.0 # 等待时间(s) global_frame: odom # 全局坐标系 robot_base_frame: base_footprint # 机器人基座坐标系 transform_timeout: 0.1 # 变换超时时间(s) use_sim_time: False simulate_ahead_time: 2.0 # 模拟提前时间(s) max_rotational_vel: 1.0 # 最大旋转速度(rad/s) min_rotational_vel: 0.4 # 最小旋转速度(rad/s) rotational_acc_lim: 3.2 # 旋转加速度限制(rad/s²) # 机器人状态发布器参数 robot_state_publisher: ros__parameters: use_sim_time: False # 航点跟随器配置 waypoint_follower: ros__parameters: use_sim_time: False loop_rate: 20 # 循环频率(Hz) stop_on_failure: false # 失败时是否停止 waypoint_task_executor_plugin: "wait_at_waypoint" # 航点任务执行器插件 wait_at_waypoint: plugin: "nav2_waypoint_follower::WaitAtWaypoint" # 等待插件 enabled: True # 是否启用 waypoint_pause_duration: 200 # 航点暂停时间(ms) ```
admin
2025年12月4日 08:32
180
转发
收藏文档
上一篇
下一篇
手机扫码
复制链接
手机扫一扫转发分享
复制链接
分享
链接
类型
密码
更新密码
有效期
Markdown文件
Word文件
PDF文档
PDF文档(打印)
AI