ROS2自动驾驶
yolo5自动驾驶
1、重要!更换U盘的操作指引
2、关闭开机自启动大程序
3、Linux基础
4、YoloV5训练集
5、自动驾驶基础调试(代码解析)
6、自动驾驶特调
7、自动驾驶原理
8、PID算法理论
9、阿克曼运动学分析理论
10、建立运动学模型
常用命令
!重要!首次使用
一、原理分析
麦克纳姆轮运动学分析
二、AI大模型
3、AI大模型类型和原理
4、RAG检索增强和模型训练样本
5、具身智能机器人系统架构
6、具身智能玩法核心源码解读
7、配置AI大模型
8、配置API-KEY
三、深度相机
2、颜色标定
10、深度相机的基础使用
11、深度相机伪彩色图像
12、深度相机测距
13、深度相机色块体积测算
14、深度相机颜色跟随
15、深度相机人脸跟随
16、深度相机KCF物体跟随
17、深度相机Mediapipe手势跟随
18、深度相机视觉循迹自动驾驶
19、深度相机边缘检测
四、多模态视觉理解
20、多模态语义理解、指令遵循
21、多模态视觉理解
22、多模态视觉理解+自动追踪
23、多模态视觉理解+视觉跟随
24、多模态视觉理解+视觉巡线
25、多模态视觉理解+深度相机距离问答
26、多模态视觉理解+SLAM导航
27、多模态视觉理解+SLAM导航+视觉巡线
28、意图揣测+多模态视觉理解+SLAM导航+视觉功能
五、雷达
8、雷达基础使用
思岚系列雷达
六、建立地图
9、Gmapping建图
cartographer快速重定位导航
RTAB-Map导航
RTAB-Map建图
slam-toolbox建图
cartographer建图
Navigation2多点导航避障
Navigation2单点导航避障
手机APP建图与导航
七、新机器人自动驾驶与调整
多模态视觉理解+SLAM导航
新机器人自动驾驶
场地摆放及注意事项
启动测试
识别调试
无人驾驶的车道保持
无人驾驶路标检测
无人驾驶红绿灯识别
无人驾驶之定点停车
无人驾驶转向决策
无人驾驶之喇叭鸣笛
无人驾驶减速慢行
无人驾驶限速行驶
无人驾驶自主泊车
无人驾驶综合应用
无人驾驶融合AI大模型应用
八、路网规划
路网规划导航简介
构建位姿地图
路网标注
路网规划结合沙盘地图案例
路径重规划
九、模型训练
1、数据采集
2、数据集标注
3、YOLOv11模型训练
4、模型格式转换
十、YOLOV11开发
多机通讯配置
汝城县职业中等专业学校知识库-信息中心朱老师编辑
-
+
首页
yolo5自动驾驶
2、关闭开机自启动大程序
2、关闭开机自启动大程序
## 1、什么是开机自启动大程序 为了能够方便体验小车的APP功能,系统中增加了一个程序,此程序集合了APP的控制功能和玩法,所以称做“大程序”,而且在主板系统开机时,此程序会自动启动,所以称做“开机自启动大程序”。 开机自启动大程序只是为了方便体验手机APP功能,在实际开发中,是需要将大程序关闭的,否则会占用设备,造成不可预估错误。所以开发程序前,请先手动关闭开机自启动大程序。 关闭开机自启动大程序有两种方式,一种是只关闭一次,下次开机它还会自动启动,叫做**临时关闭**,另一种方式是关闭后下次开机不会再自动启动,除非手动重新开启,叫做**永久关闭**。 ### 1.2、临时关闭大程序 使用同一局域网内的电脑打开VNC Viewer软件远程登录桌面的方式进入桌面。 进入桌面后看到有一个终端,直接点击左上角的X符号关闭终端即可关闭大程序。有时候可能会提示关闭终端会关闭正在运行的程序,选择确认关闭就可以。  ### **2.3、永久关闭大程序** 先按照临时关闭的方式操作关闭正在运行的大程序。 再打开Ubuntu系统的应用程序,搜索Startup Applications,将start_rosmaster_app前面的勾去掉,如下图所示,即可永久关闭大程序。 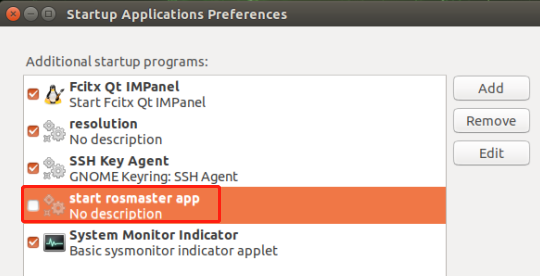 ### 2.4、设置开机启动大程序 在打开Ubuntu系统的应用程序,搜索Startup Applications,将start_rosmaster_app前面的方格打上勾,如下图所示,则下次系统开机就会自动启动大程序。 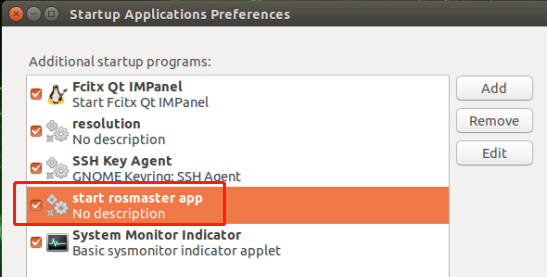 ### 2.5、临时启动大程序 如果需要手动运动大程序,请先打开Ubuntu的终端,然后输入以下命令: ``` python3 /home/jetson/Rosmaster-App/rosmaster ```
admin
2025年11月25日 07:45
70
转发
收藏文档
上一篇
下一篇
手机扫码
复制链接
手机扫一扫转发分享
复制链接
Markdown文件
Word文件
PDF文档
PDF文档(打印)
分享
链接
类型
密码
更新密码
有效期
AI