ROS2自动驾驶
yolo5自动驾驶
1、重要!更换U盘的操作指引
2、关闭开机自启动大程序
3、Linux基础
4、YoloV5训练集
5、自动驾驶基础调试(代码解析)
6、自动驾驶特调
7、自动驾驶原理
8、PID算法理论
9、阿克曼运动学分析理论
10、建立运动学模型
常用命令
!重要!首次使用
一、原理分析
麦克纳姆轮运动学分析
二、AI大模型
3、AI大模型类型和原理
4、RAG检索增强和模型训练样本
5、具身智能机器人系统架构
6、具身智能玩法核心源码解读
7、配置AI大模型
8、配置API-KEY
三、深度相机
2、颜色标定
10、深度相机的基础使用
11、深度相机伪彩色图像
12、深度相机测距
13、深度相机色块体积测算
14、深度相机颜色跟随
15、深度相机人脸跟随
16、深度相机KCF物体跟随
17、深度相机Mediapipe手势跟随
18、深度相机视觉循迹自动驾驶
19、深度相机边缘检测
四、多模态视觉理解
20、多模态语义理解、指令遵循
21、多模态视觉理解
22、多模态视觉理解+自动追踪
23、多模态视觉理解+视觉跟随
24、多模态视觉理解+视觉巡线
25、多模态视觉理解+深度相机距离问答
26、多模态视觉理解+SLAM导航
27、多模态视觉理解+SLAM导航+视觉巡线
28、意图揣测+多模态视觉理解+SLAM导航+视觉功能
五、雷达
8、雷达基础使用
思岚系列雷达
六、建立地图
9、Gmapping建图
cartographer快速重定位导航
RTAB-Map导航
RTAB-Map建图
slam-toolbox建图
cartographer建图
Navigation2多点导航避障
Navigation2单点导航避障
手机APP建图与导航
七、新机器人自动驾驶与调整
多模态视觉理解+SLAM导航
新机器人自动驾驶
场地摆放及注意事项
启动测试
识别调试
无人驾驶的车道保持
无人驾驶路标检测
无人驾驶红绿灯识别
无人驾驶之定点停车
无人驾驶转向决策
无人驾驶之喇叭鸣笛
无人驾驶减速慢行
无人驾驶限速行驶
无人驾驶自主泊车
无人驾驶综合应用
无人驾驶融合AI大模型应用
八、路网规划
路网规划导航简介
构建位姿地图
路网标注
路网规划结合沙盘地图案例
路径重规划
九、模型训练
1、数据采集
2、数据集标注
3、YOLOv11模型训练
4、模型格式转换
十、YOLOV11开发
多机通讯配置
汝城县职业中等专业学校知识库-信息中心朱老师编辑
-
+
首页
九、模型训练
2、数据集标注
2、数据集标注
>i **信息提示** > > * 机器人镜像已经包含了预设的训练路标识别模型和车道识别模型所需的数据集,本节教程提供给需要自行训练yolov11模型和想学习自己采集标注数据集的用户 如果需要直接体验完整功能,可略过本节课程!!! 本教程主要是在orin nano主板上面进行 ## 1. 课程内容 1. 掌握训练YOLOv11目标检测模型所需的数据集的数据标注方法 ## 2. 示例数据集 * **只有orin主板才建议在主板上进行模型训练,RDK主板因为性能不足需要在自己带GPU的主机进行标注和训练,训练源码在源码汇总的模型训练下的yolo_train文件夹,需要训练的可以自行将yolo_train文件夹程序放到主板根目录下** * 交通标识数据集路径 /home/jetson/yolo_train/train_sign/roadsign_dataset.zip * 车道数据集路径 /home/jetson/yolo_train/train_lane/lane_dataset.zip ## 3. 标注交通标识数据集 ### 3.1 Label Studio简介 Label Studio是一个开源的数据标注平台,用于数据标注和标注任务的管理,支持各种类型的数据输入和标注格式。  Note 出厂镜像环境已经安装了Label Studio!!!如果用户需要在自己的电脑上搭建数据标注环境,需要先安装Label Studio pip install label-studio ### 3.2 启动Label Studio * 启动 Label Studio sudo docker run -it -p 8080:8080 -v /home/jetson/ultralytics/ultralytics/data:/label-studio/data heartexlabs/label-studio:latest label-studio  ### 3.3 访问Label Studio 让电脑和车机处于同一局域网下,在浏览器地址栏中输入车机IP+8080端口,车机的IP可以从车机前的OLED屏或者新打开一个终端进行查看,这里以`IP:192.168.12.33`为例: 192.168.12.33:8080  * 出厂设置账号信息(均为本地存储信息,无数据泄漏风险): 账号:yahboom@163.com 密码:yahboom@163.com * 如果需要创建新的账户,点击`sign up`  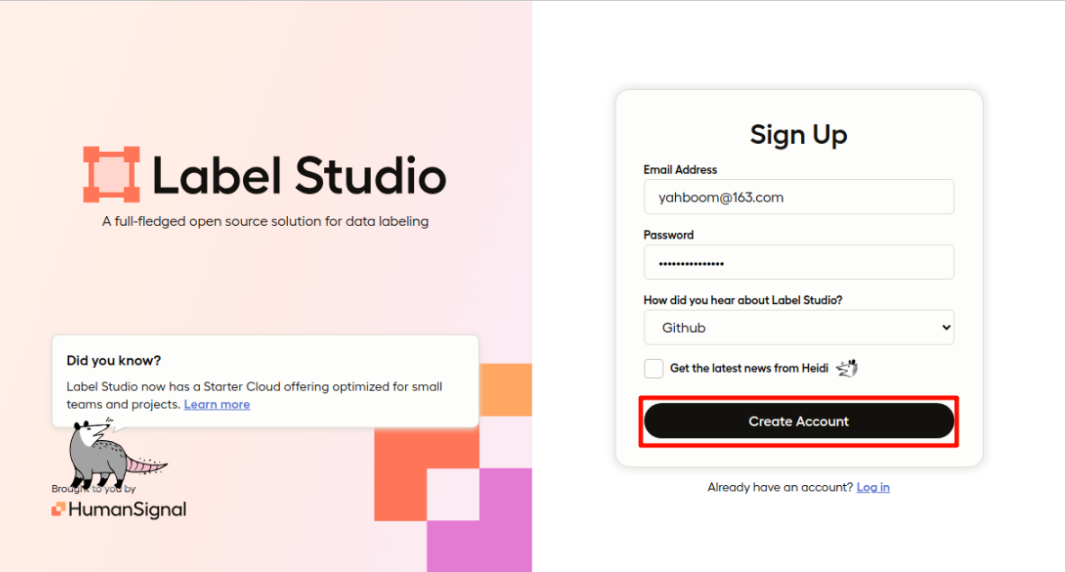 注册完成后后,网址会自动登录: 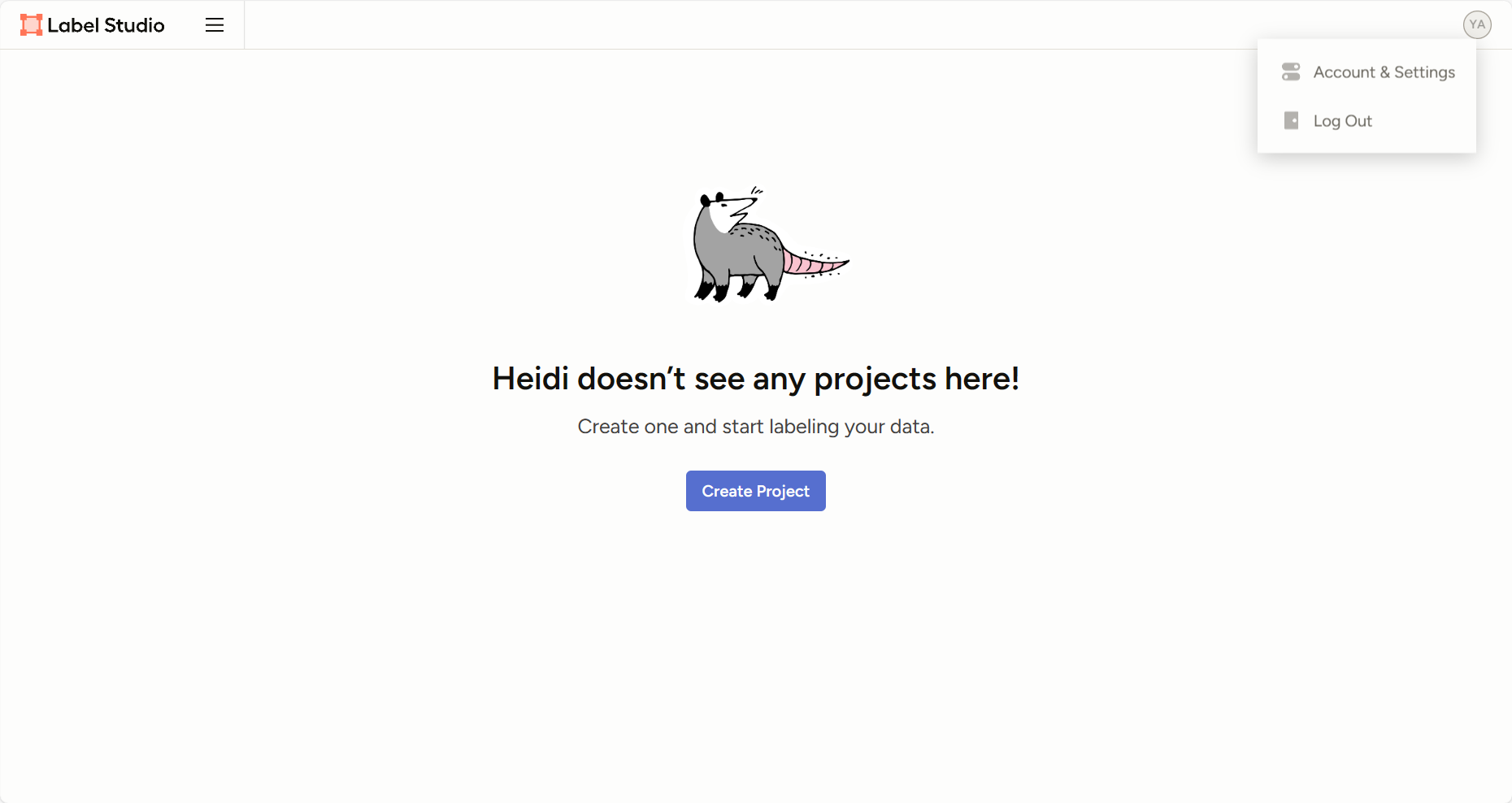 ### 3.4 创建工程 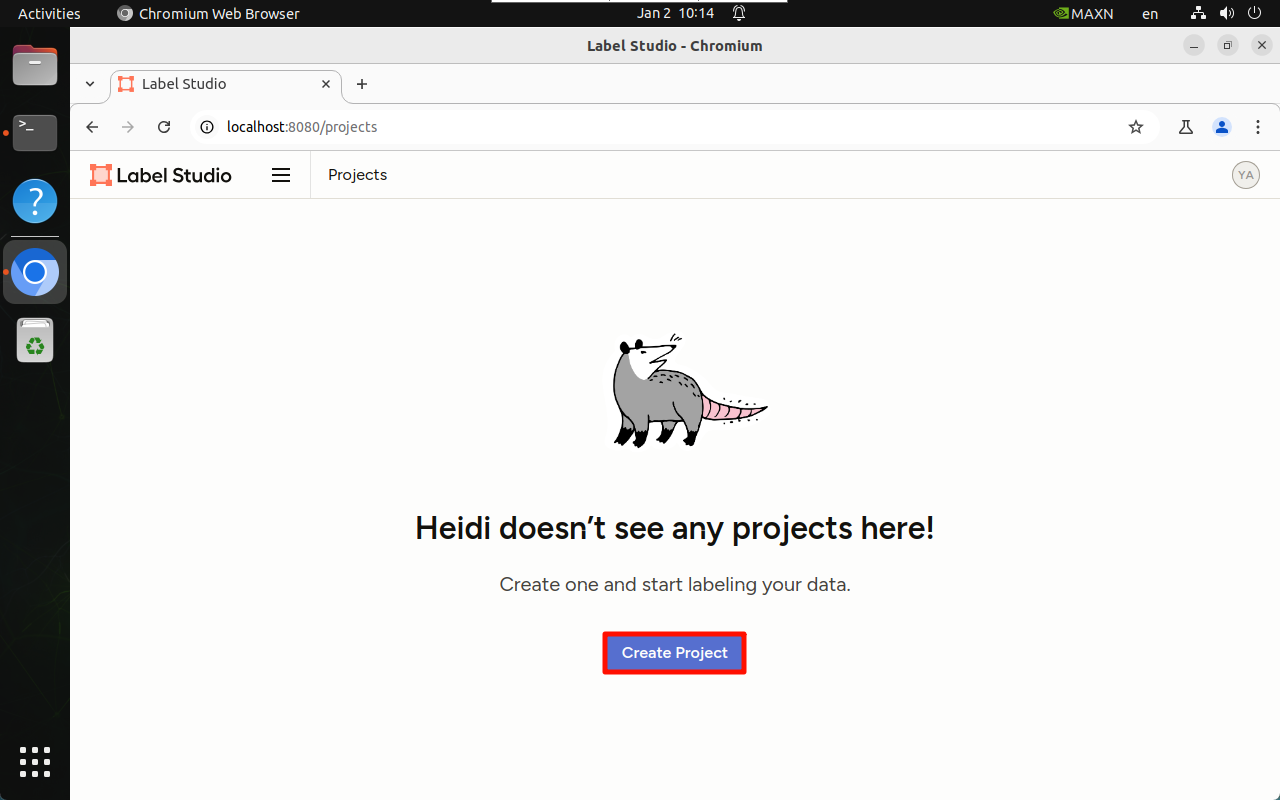 工程名称可自己随意命名,根据自己的训练集来命名: 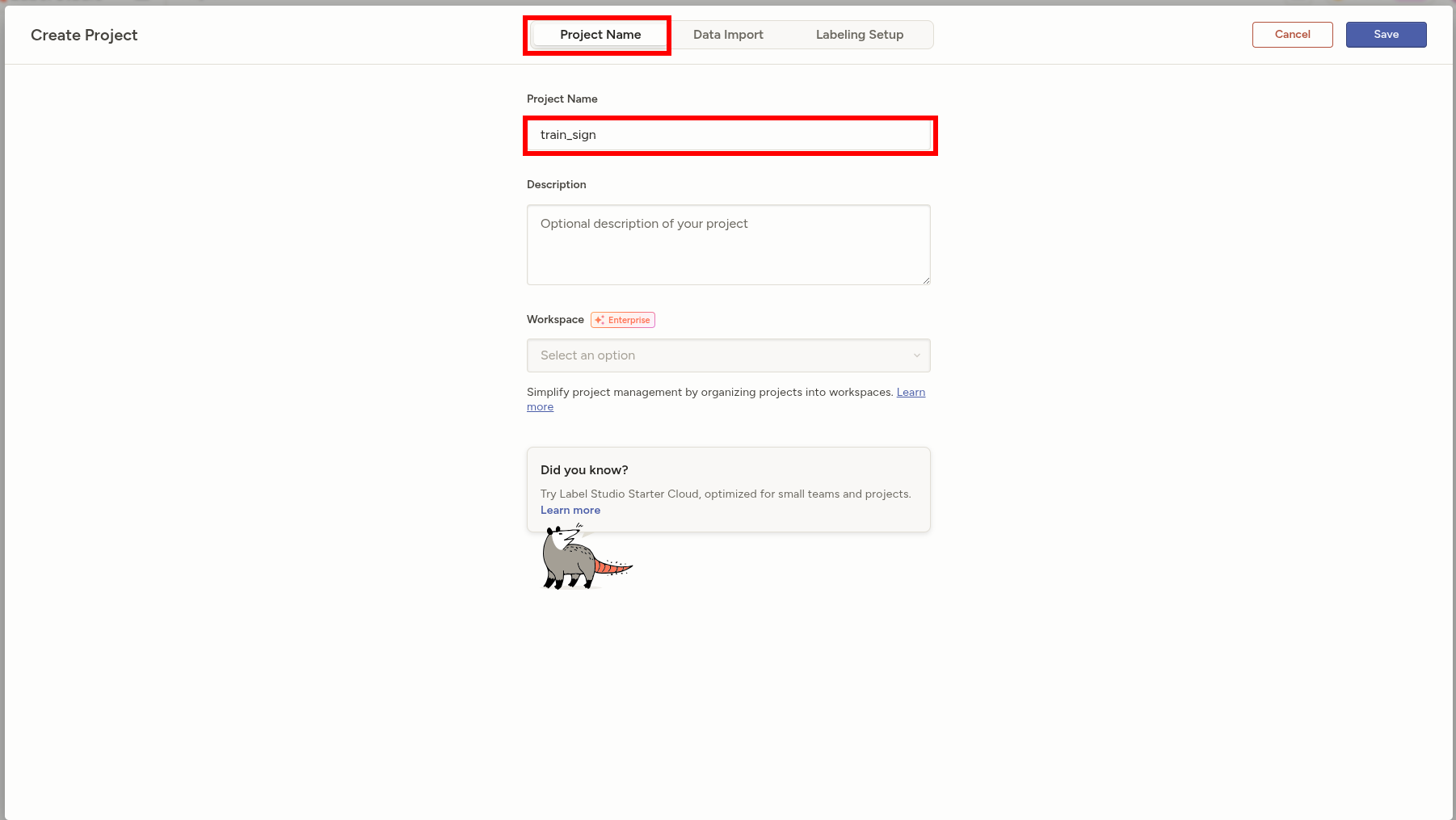 ### 3.5 导入图片 * 将之前从视频中分割出的图片进行导入的:一次不能导入过多图片,建议每次选择50-100张,然后多次导入 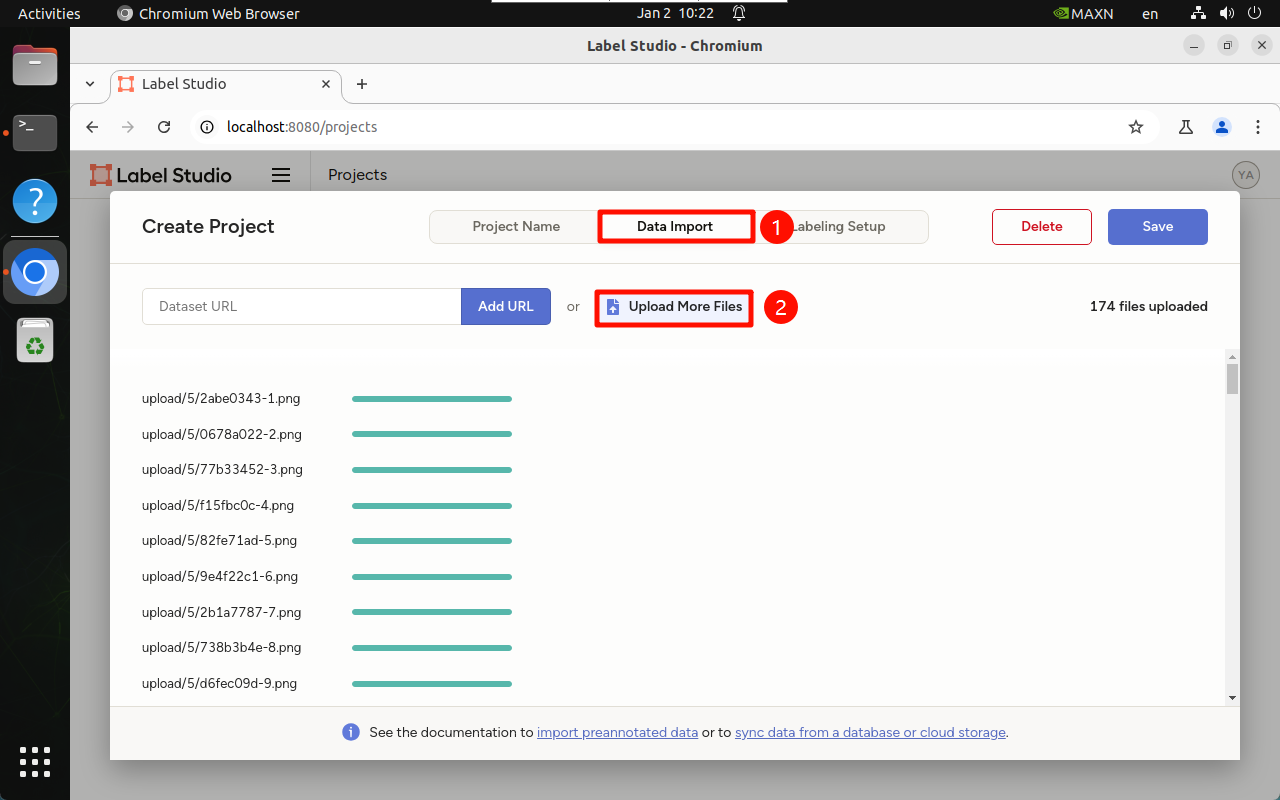 ### 3.6 标签设置 我们演示的是识别橙子,所以选择”物体检测“ 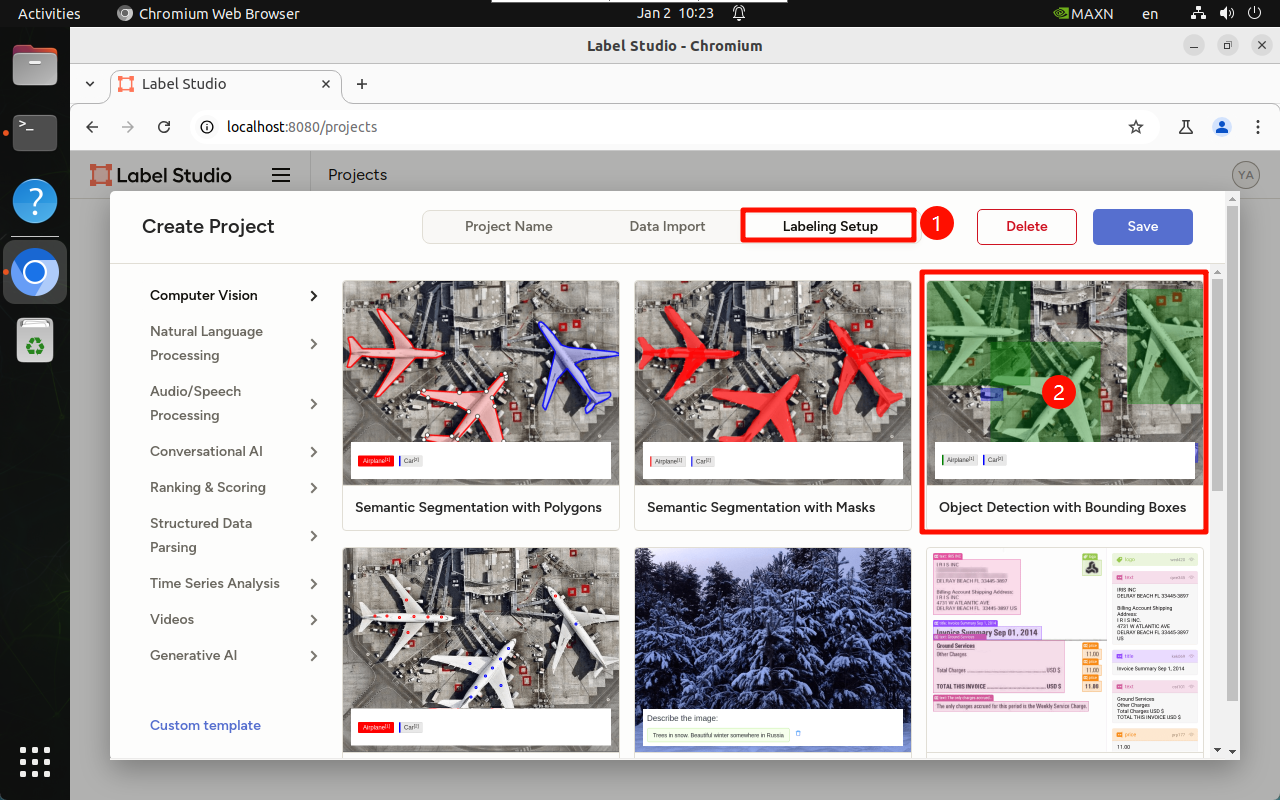 * 删除内置标签: 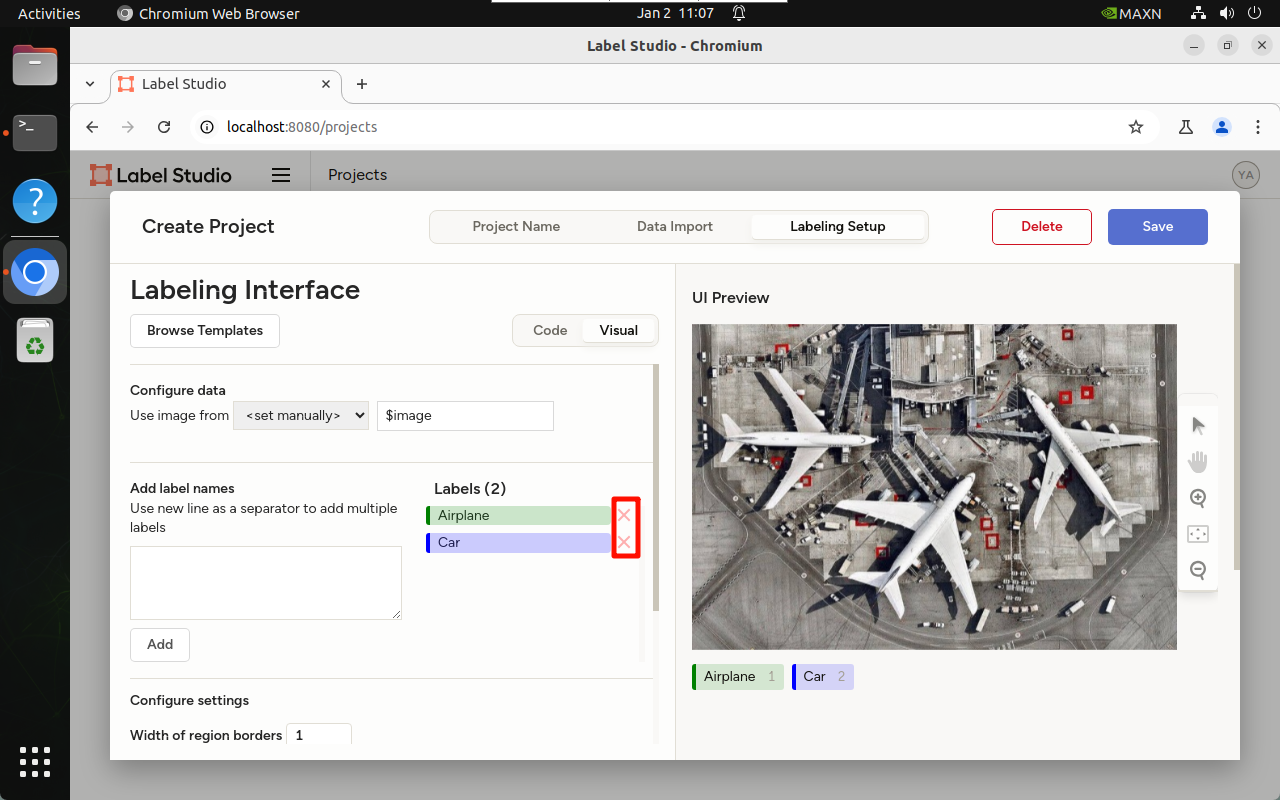 * 添加新的标签,这里示例中给沙盘配套地图中所有的路标和地面表标识命名 Tip 用户如果是想训练自己的其他类别的目标检测模型,检测目标不是路标或车道,根据自己数据集中需要检测目标来命名标签。 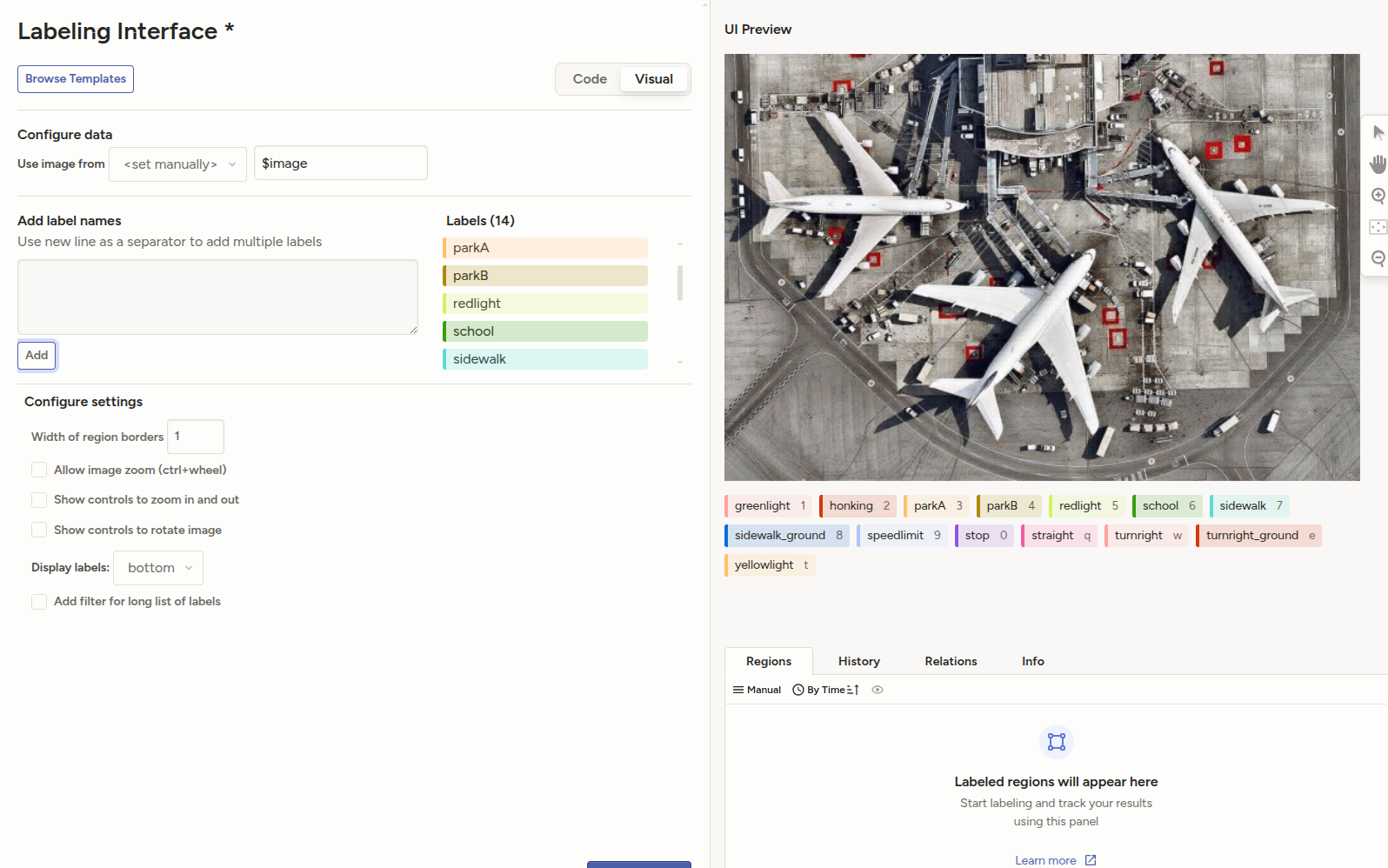 ### 3.7 数据集标注 * 点击标注所有任务: 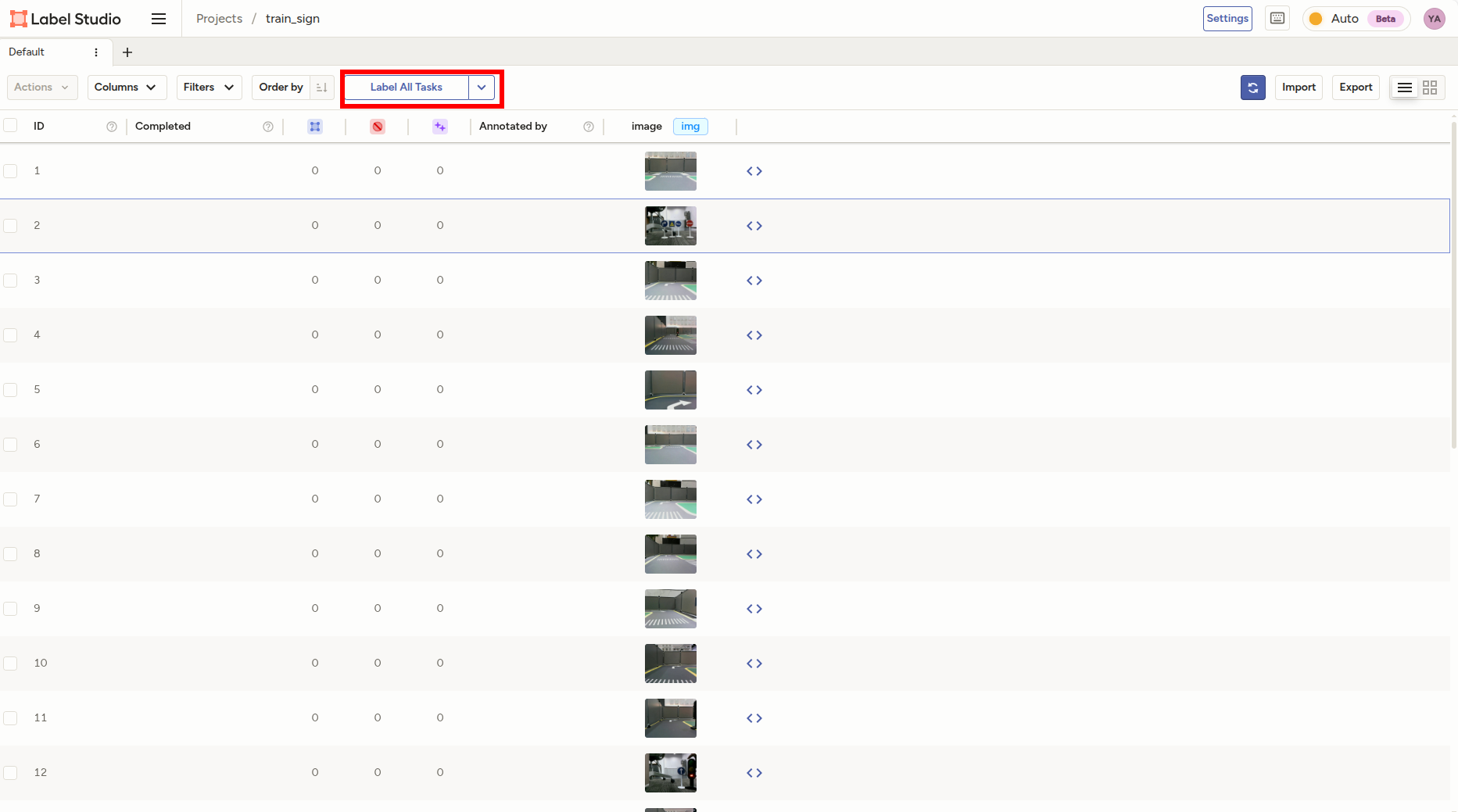 * 下方标签上显示有对应目标类别的快捷键,按下键盘上对应快捷键,可以快速选中该标签。 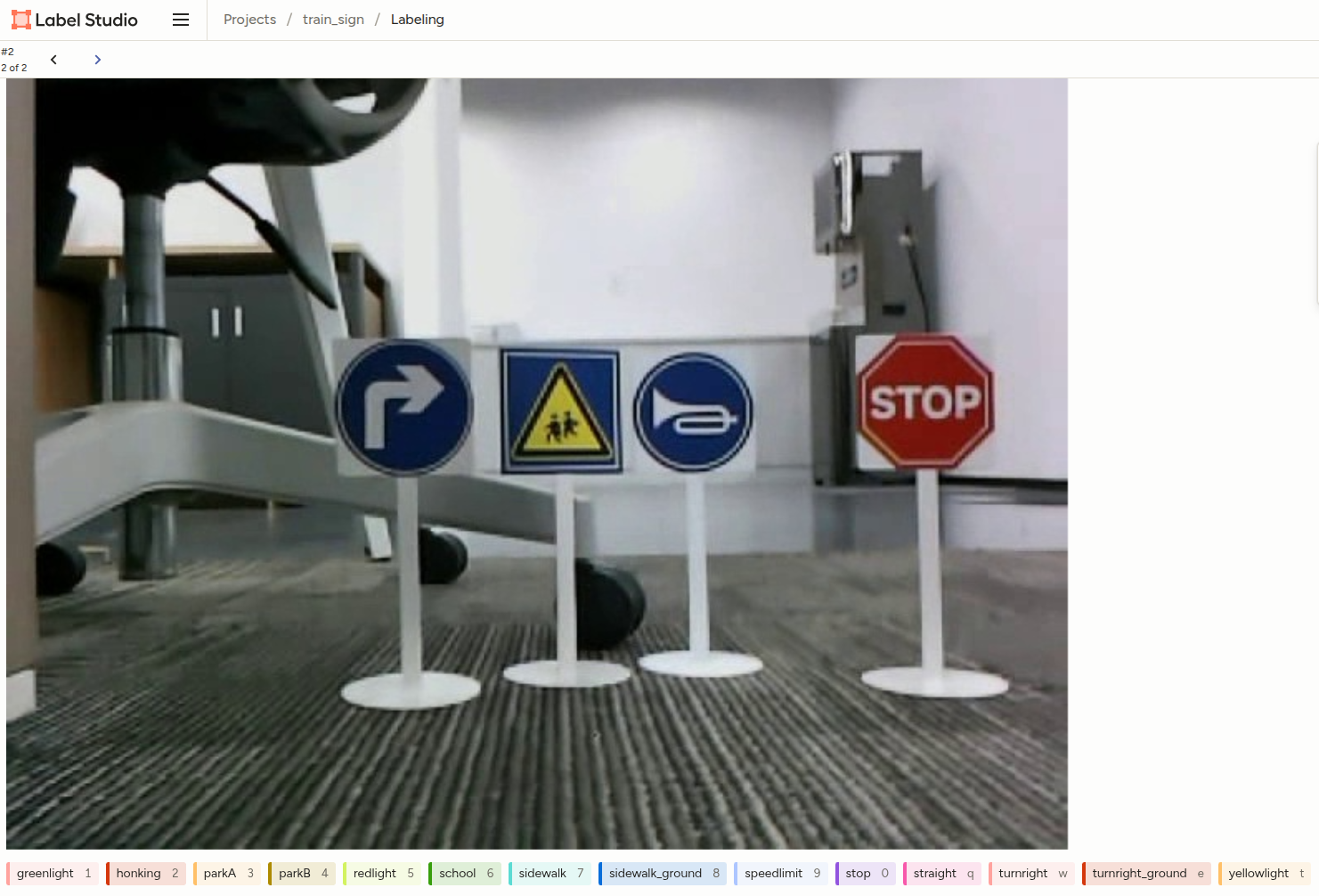 * 然后拖动鼠标框选出与选择对应的目标,这里图中有4种类型目标,标记完成后右侧`Regions`栏中会显示已经标记的标签,可以在这里进行核对标记是否正确。 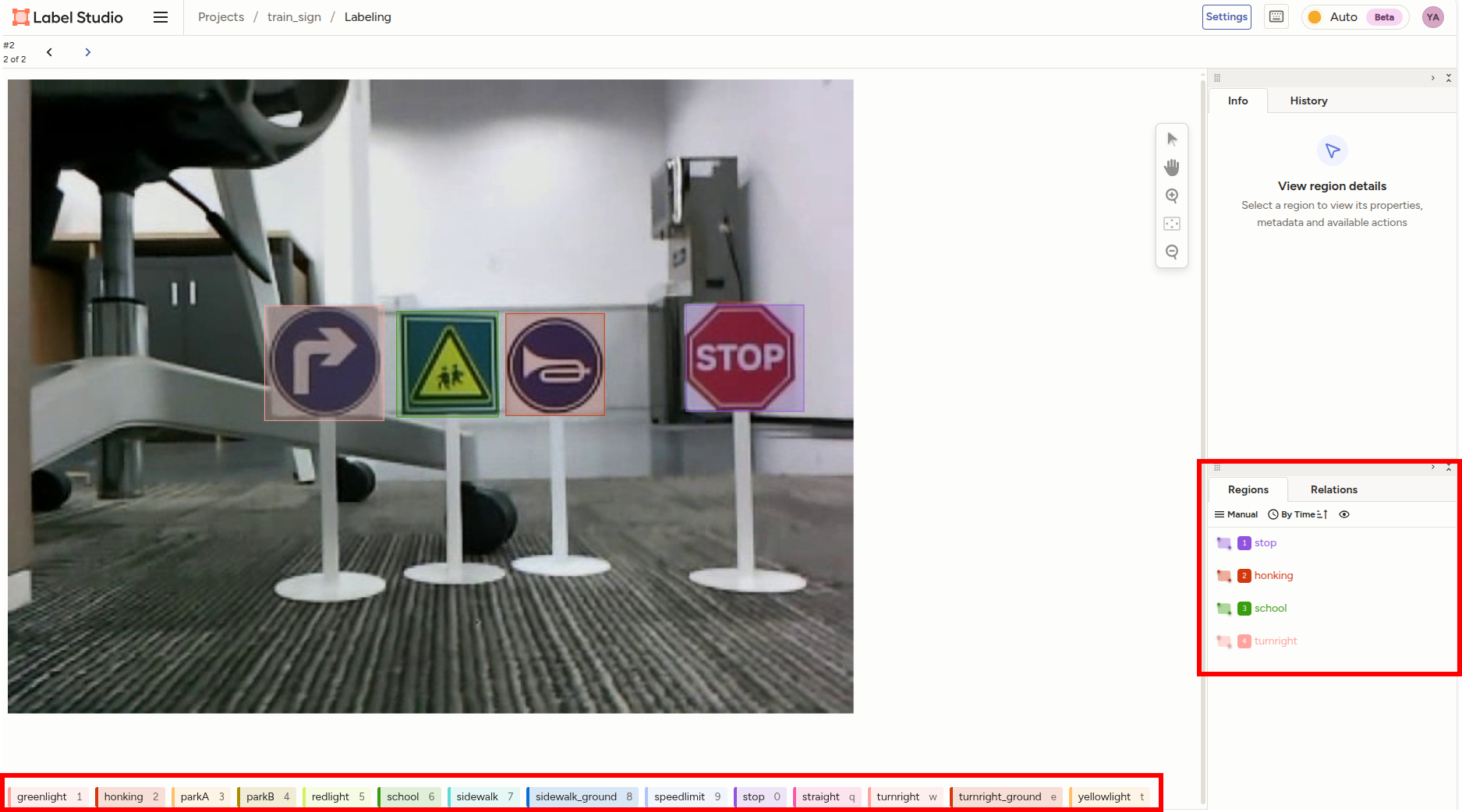 * 标记完成后点击`Submit`进行提交,然后会自动跳转到下一张图片,重复标注直到完成所有的图片的数据标注。 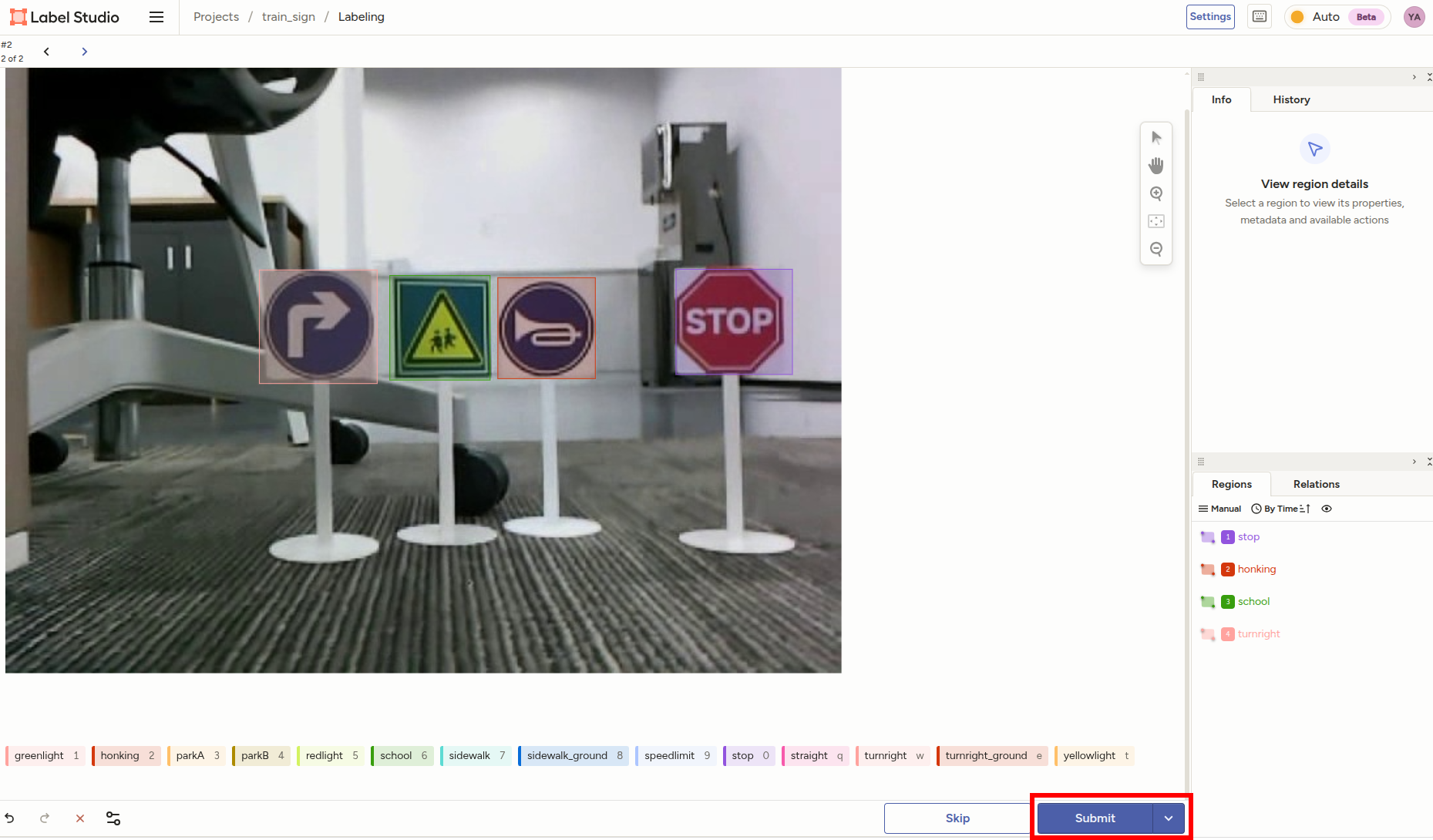 ### 3.8 导出数据集 * 选择要导出的项目,点击右上角的`Export` 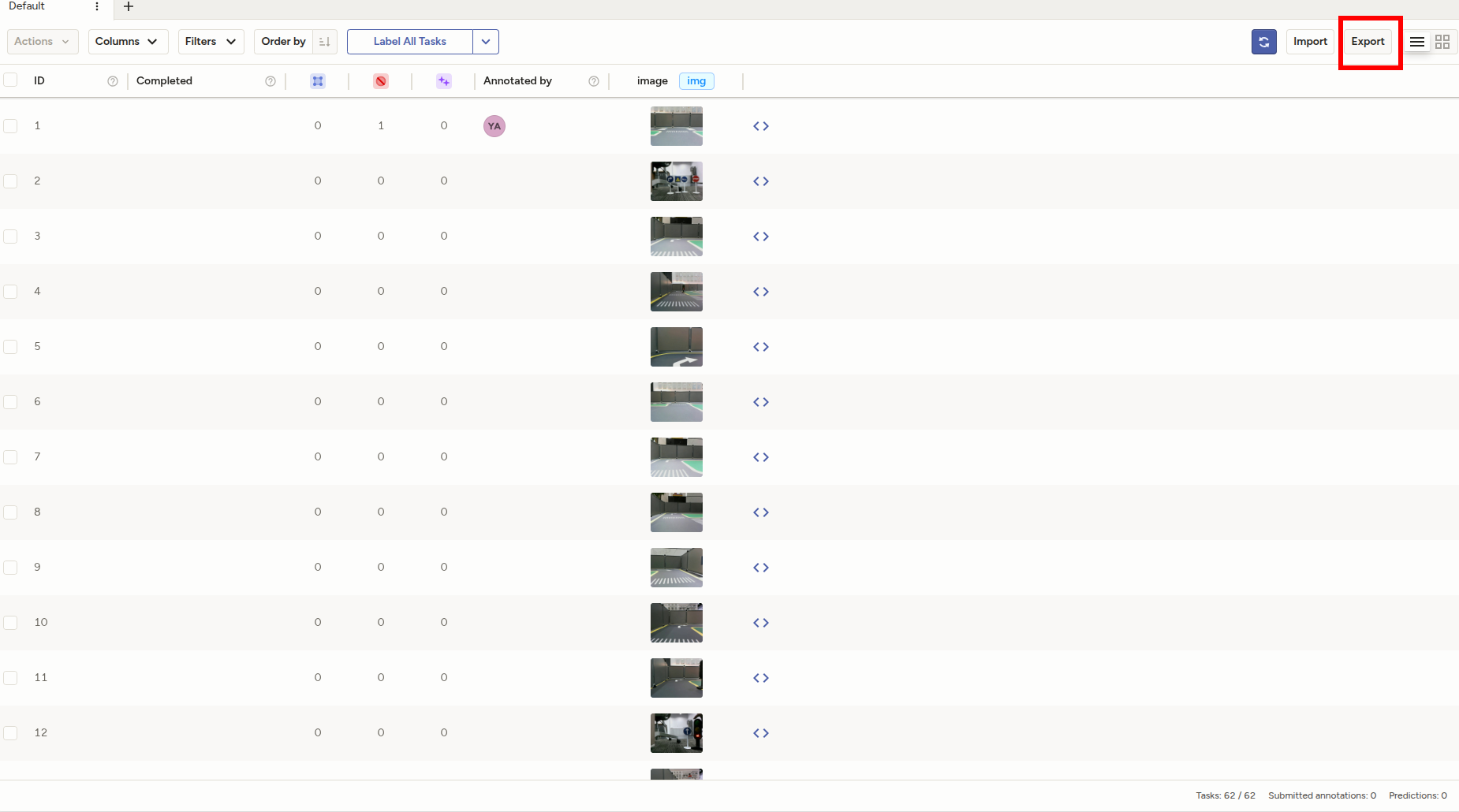 * 选择`YOLO with Images`格式进行导出,浏览器会自动下载一个压缩包 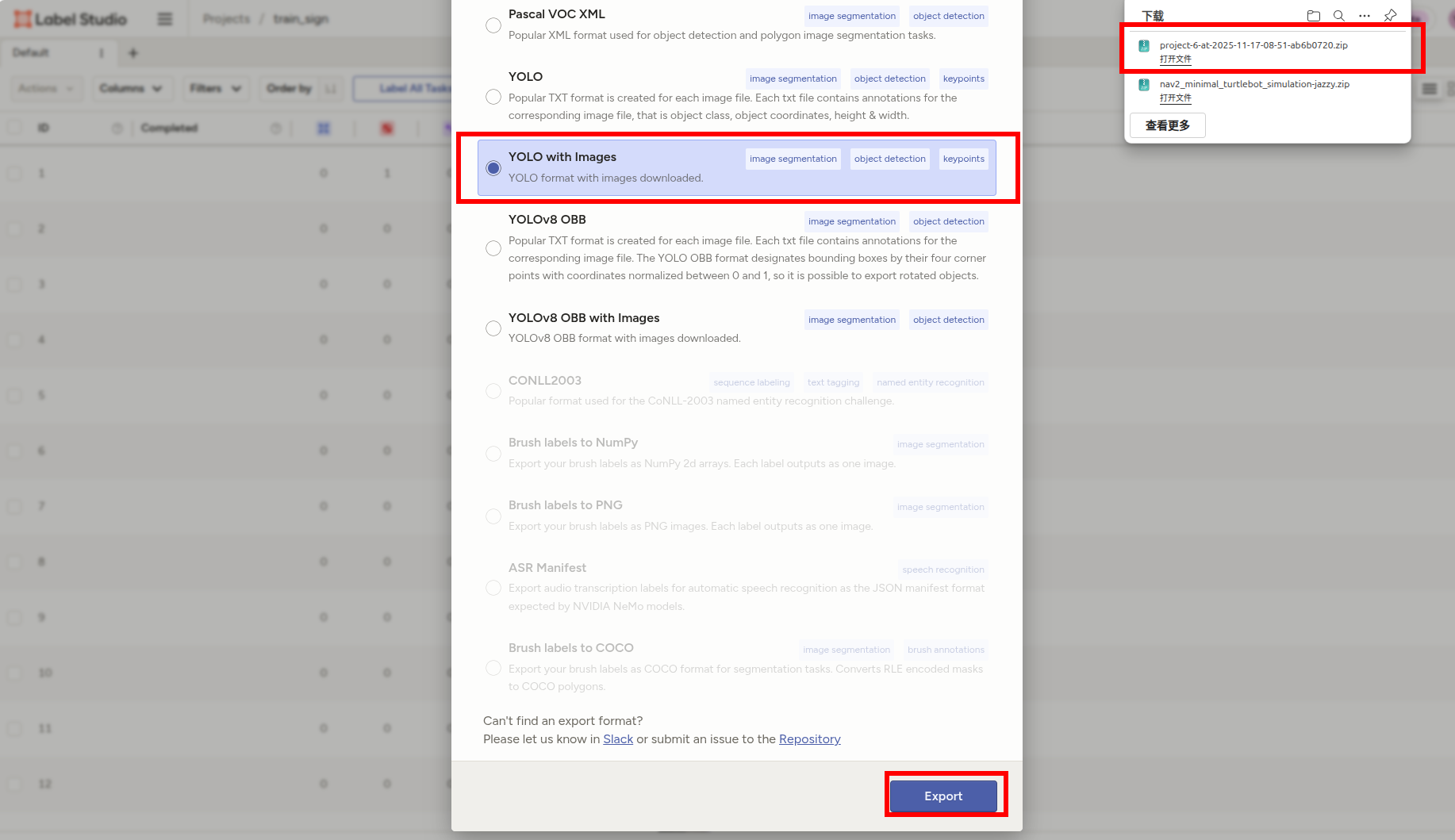 ### 3.9 整理数据集目录框架 * 使用Label Studio导出的压缩包对应的目录框架如下: . ├── images ├── labels ├── classes.txt └── notes.json 文件夹和文件说明: * mages:存放的是原始图像 * labels:每张图片对应的标注数据 * classes.txt :目标分类 * notes.json:目标分类与对应编号 * * * * 为了让YOLOv11能识别数据集,需要对Label Studio中导出数据的目录结构做一些调整 * 将Label Studio导出images、labels分成train(训练集)和val(验证集),train和val里面的图片和标签都需要名称一一对应 * 这里为了示例直接将train目录下的images和labels复制进val目录下 . ├── classes.txt ├── notes.json ├── train │ ├── images │ └── labels └── val ├── images └── labels * 以下是教程示例数据集的目录结构(出厂的车机镜像和本节教程文件夹中提供的数据集是.zip压缩包格式,需要先解压才能看到完整目录结构) 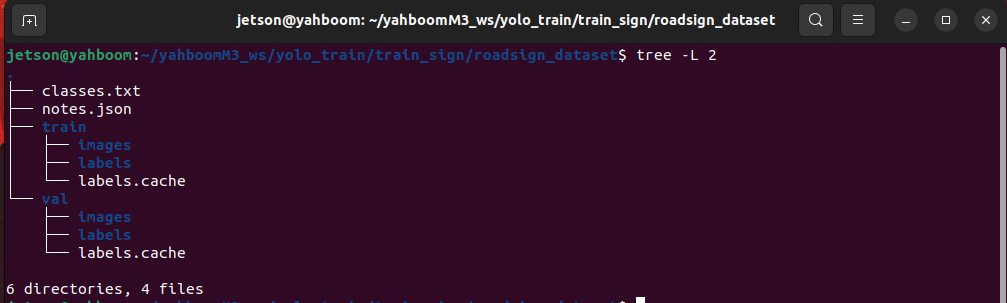 ### 3.10 数据集配置文件 * YOLOv11训练模型时,需要通过yaml格式的配置文件来指定数据集的路径和检测目标类别 * 交通标识数据集的配置文件路径: /home/jetson/yolo_train/train_sign/sign.yaml 内容解析: * path:数据集路径 * train:训练集路径 * val: 验证集路径 * names:检测目标类别(需要和Label Studio中导出的notes.json中序号类别保持一致) path: /home/jetson/yolo_train/roadsign_dataset # dataset root dir train: train/images val: val/images # Classes names: 0: greenlight 1: honking 2: parkA 3: parkB 4: redlight 5: school 6: sidewalk 7: sidewalk_ground 8: speedlimit 9: stop 10: straight 11: turnright 12: turnright_ground 13: yellowlight ## 4. 标注车道检测数据集 车道检测数据集标注和交通标识数据集标注流程基本一致,都是使用yolov11的目标检测模型进行目标检测(这里推荐使用目标检测模型,不建议使用分割模型进行车道检测,模型推理速度较慢) ### 4.1 创建工程 * 创建流程和前边一致,这里`Projet Name`填入`train_lane` 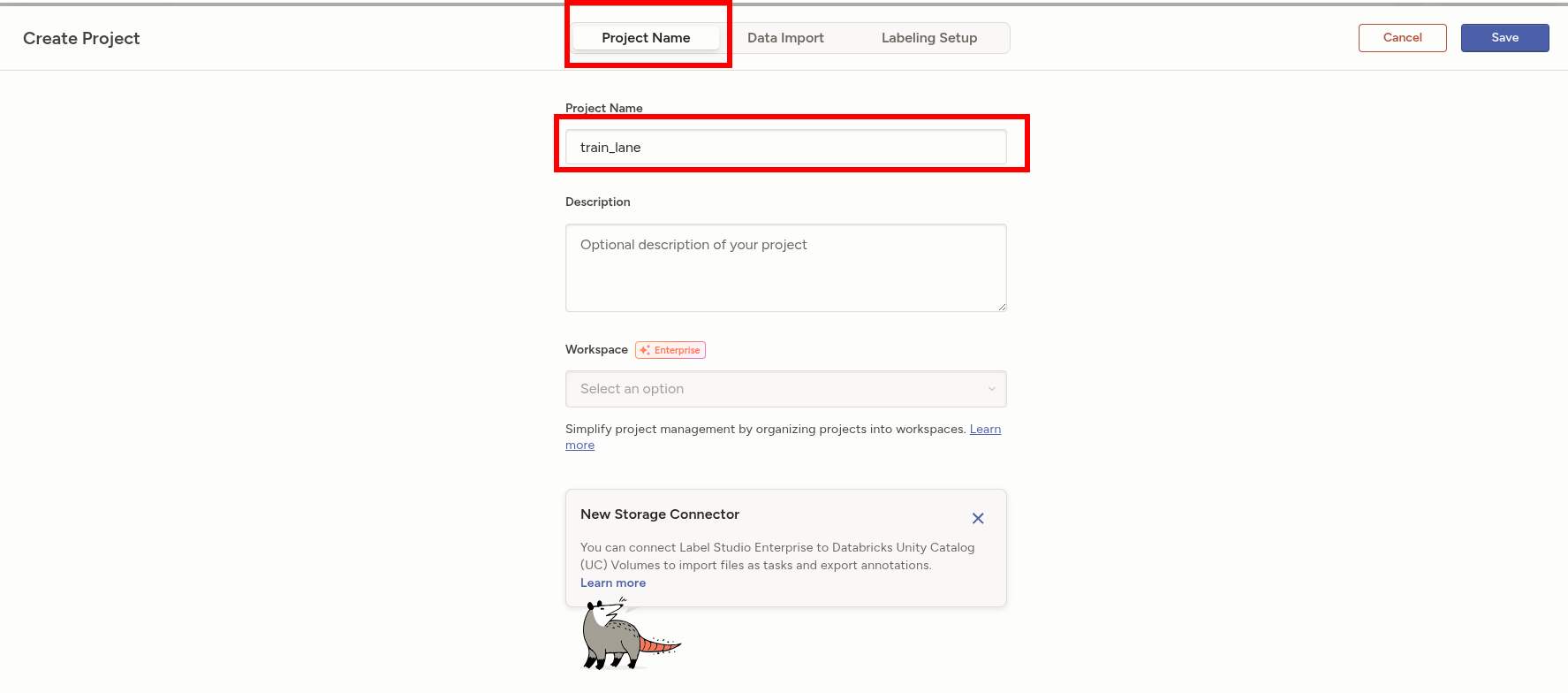 * 这里车道线检测模型类别只有一个,填入`lane` 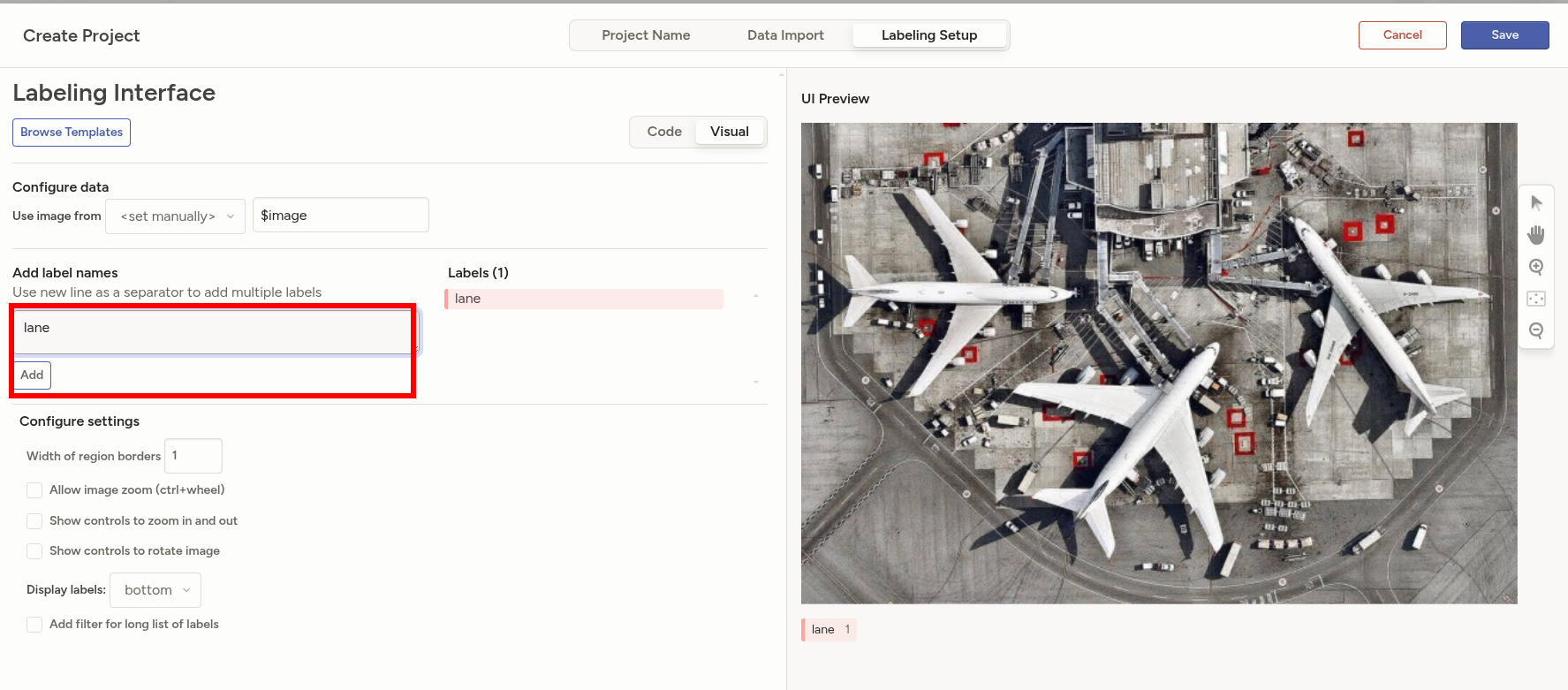 * 导入分割好的车道视频帧数据集 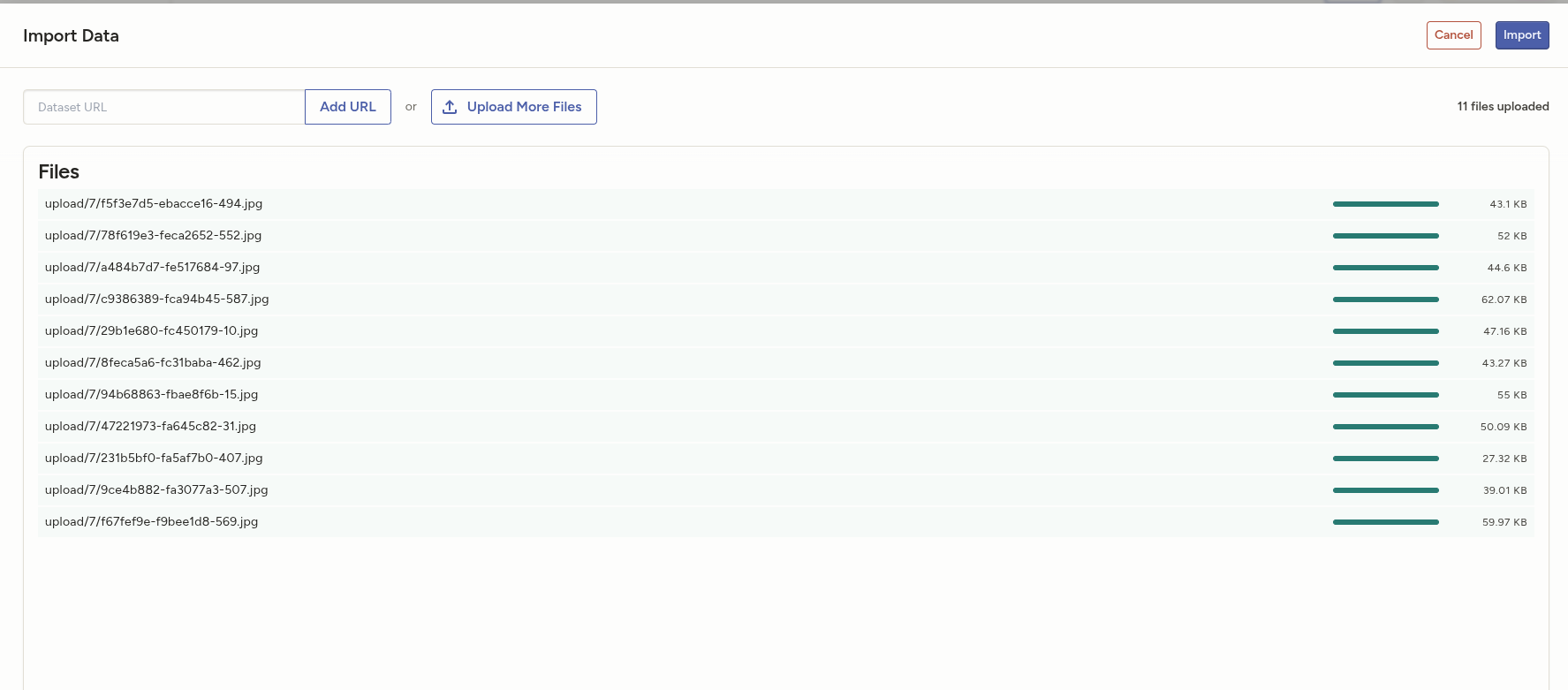 * 标注方法和前边一致,这里我们将所有的车道线进行框选标注 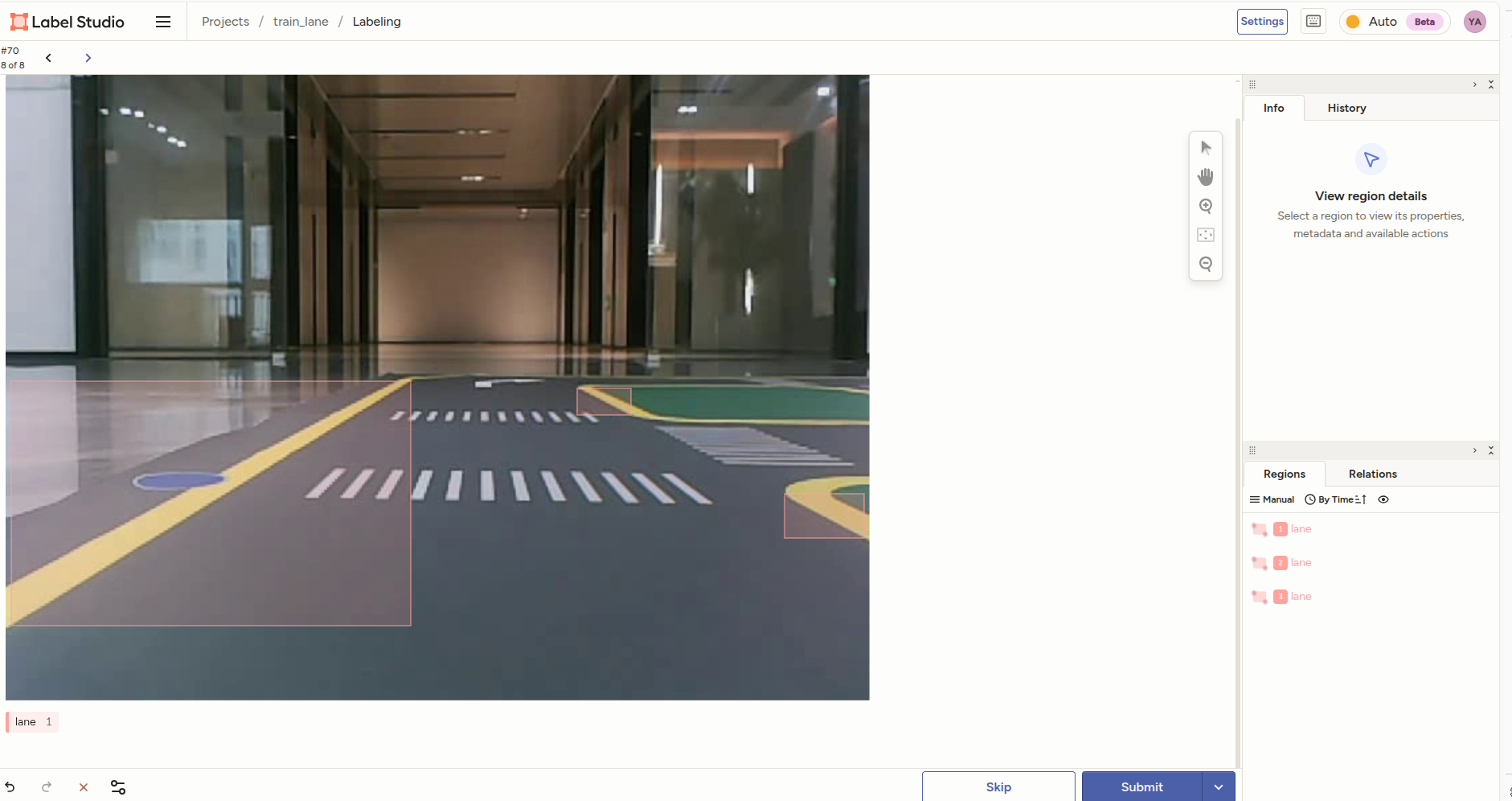 ### 4.2 整理导出数据集 * 标注完成后,我们将数据集进行导出整理称YOLO可以识别的目标结构,方法和前边交通标识数据集导出整理方法完全一致 * 参考目标结构如下: 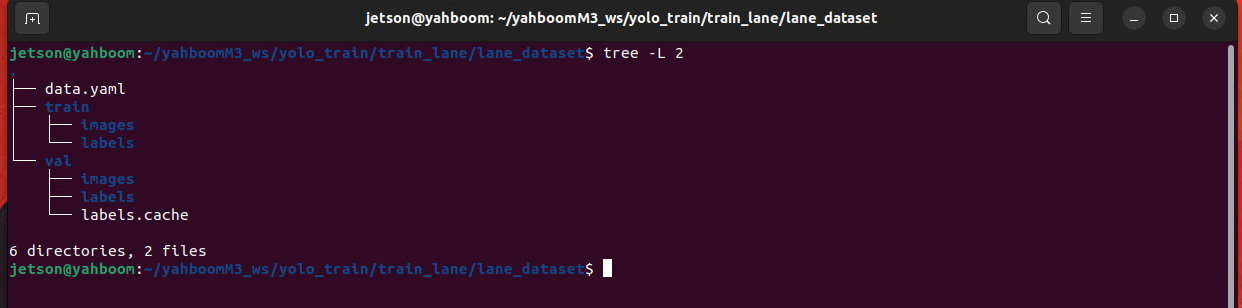 ### 4.3 数据集配置文件 * 车道线检测数据集的配置文件路径: /home/jetson/yolo_train/train_lane/lane.yaml * 示例配置文件如下: path: /home/jetson/yolo_train/train_lane/lane_datase # dataset root dir train: train/images val: val/images # Classes names: 0: lane
admin
2025年12月28日 18:16
26
转发
收藏文档
上一篇
下一篇
手机扫码
复制链接
手机扫一扫转发分享
复制链接
Markdown文件
Word文件
PDF文档
PDF文档(打印)
分享
链接
类型
密码
更新密码
有效期
AI