ROS2自动驾驶
yolo5自动驾驶
1、重要!更换U盘的操作指引
2、关闭开机自启动大程序
3、Linux基础
4、YoloV5训练集
5、自动驾驶基础调试(代码解析)
6、自动驾驶特调
7、自动驾驶原理
8、PID算法理论
9、阿克曼运动学分析理论
10、建立运动学模型
常用命令
!重要!首次使用
一、原理分析
麦克纳姆轮运动学分析
二、AI大模型
3、AI大模型类型和原理
4、RAG检索增强和模型训练样本
5、具身智能机器人系统架构
6、具身智能玩法核心源码解读
7、配置AI大模型
8、配置API-KEY
三、深度相机
2、颜色标定
10、深度相机的基础使用
11、深度相机伪彩色图像
12、深度相机测距
13、深度相机色块体积测算
14、深度相机颜色跟随
15、深度相机人脸跟随
16、深度相机KCF物体跟随
17、深度相机Mediapipe手势跟随
18、深度相机视觉循迹自动驾驶
19、深度相机边缘检测
四、多模态视觉理解
20、多模态语义理解、指令遵循
21、多模态视觉理解
22、多模态视觉理解+自动追踪
23、多模态视觉理解+视觉跟随
24、多模态视觉理解+视觉巡线
25、多模态视觉理解+深度相机距离问答
26、多模态视觉理解+SLAM导航
27、多模态视觉理解+SLAM导航+视觉巡线
28、意图揣测+多模态视觉理解+SLAM导航+视觉功能
五、雷达
8、雷达基础使用
思岚系列雷达
六、建立地图
9、Gmapping建图
cartographer快速重定位导航
RTAB-Map导航
RTAB-Map建图
slam-toolbox建图
cartographer建图
Navigation2多点导航避障
Navigation2单点导航避障
手机APP建图与导航
七、新机器人自动驾驶与调整
多模态视觉理解+SLAM导航
新机器人自动驾驶
场地摆放及注意事项
启动测试
识别调试
无人驾驶的车道保持
无人驾驶路标检测
无人驾驶红绿灯识别
无人驾驶之定点停车
无人驾驶转向决策
无人驾驶之喇叭鸣笛
无人驾驶减速慢行
无人驾驶限速行驶
无人驾驶自主泊车
无人驾驶综合应用
无人驾驶融合AI大模型应用
八、路网规划
路网规划导航简介
构建位姿地图
路网标注
路网规划结合沙盘地图案例
路径重规划
九、模型训练
1、数据采集
2、数据集标注
3、YOLOv11模型训练
4、模型格式转换
十、YOLOV11开发
多机通讯配置
汝城县职业中等专业学校知识库-信息中心朱老师编辑
-
+
首页
八、路网规划
路网标注
路网标注
# 路网描述文件标注 ## 1. 课程内容 1.使用route_tool工具标注描述路网的.geojson格式文件 >i **信息提示** >使用到rviz可视化都在虚拟机`Rosmaster-RoadNet-Ubuntu24.04`中启动 ## 2. 路网标注 打开~/.bashrc,将此行取消注释,改成如图,(学习完路网规划功能后,请将此注释还原,以免影响前面的案例) ``` vim ~/.bashrc :wq #保存退出 source ~/.bashrc #更新环境 ``` 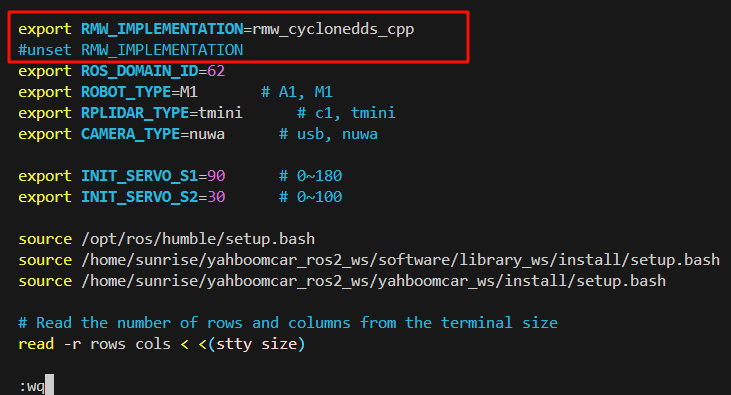 ### 2.1 启动导航节点 * 标记路网时我们需要知道车机在地图中具体位置,所以这里我们需要使用导航节点的全局定位 ```底盘雷达驱动(这句代码需要在车端运行) ros2 launch yahboomcar_nav laser_bringup_launch.py ``` ```启动可视化(这句代码必须在虚拟机运行) ros2 launch road_net_route rviz_only.launch.py tools:=true ``` 导航节点(这句代码需要在车端运行) ``` ros2 launch yahboomcar_nav navigation_teb_launch.py map:=/home/jetson/map/map.yaml ``` >i **信息提示** >启动参数说明 > map 需要加载的栅格地图名称,这里选择的是上节课保存好的地图 * rviz中会显示地图和两个坐标系,其中map是地图坐标系,base_footprint是车机底盘中心在地面的投影点坐标系,我们先通过`2D Pose Estimate`给定小车在我们建的地图上的初始位姿,大概在地图的位置。 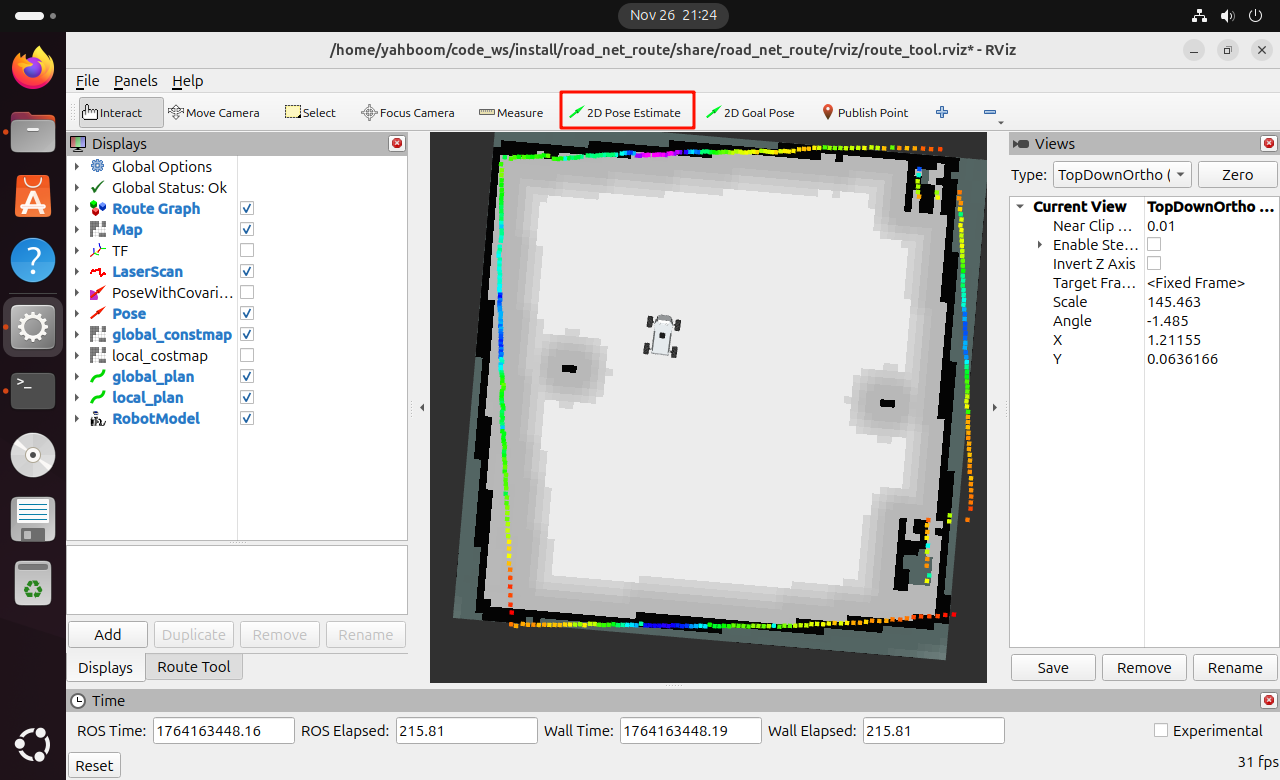 * 给定大概的位置后,这里可以通过键盘控制、手柄控制、rviz中的`2D Goal Pose`导航其一移动机器人车机,要让雷达激光轮廓完全匹配地图。 * 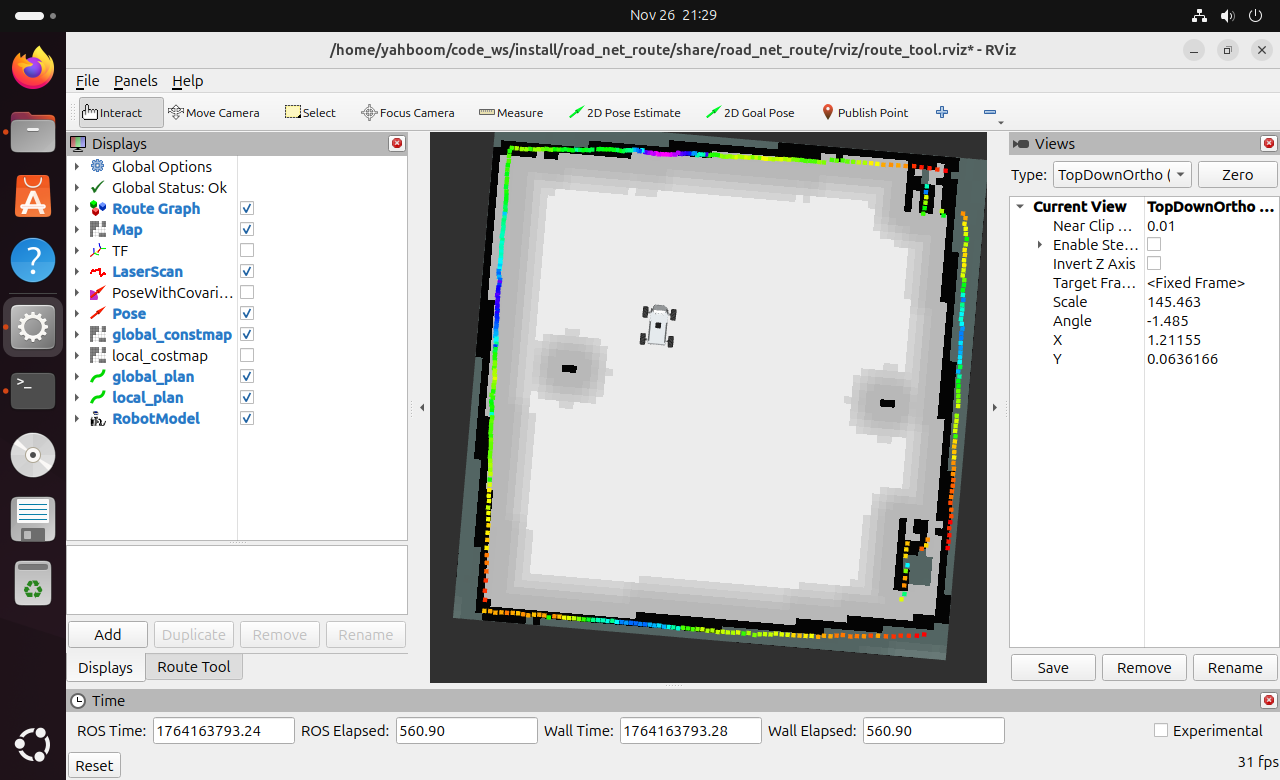 ### 2.2 添加路点 * 点击rviz工具栏的`Publish Point`工具进入路点选择状态 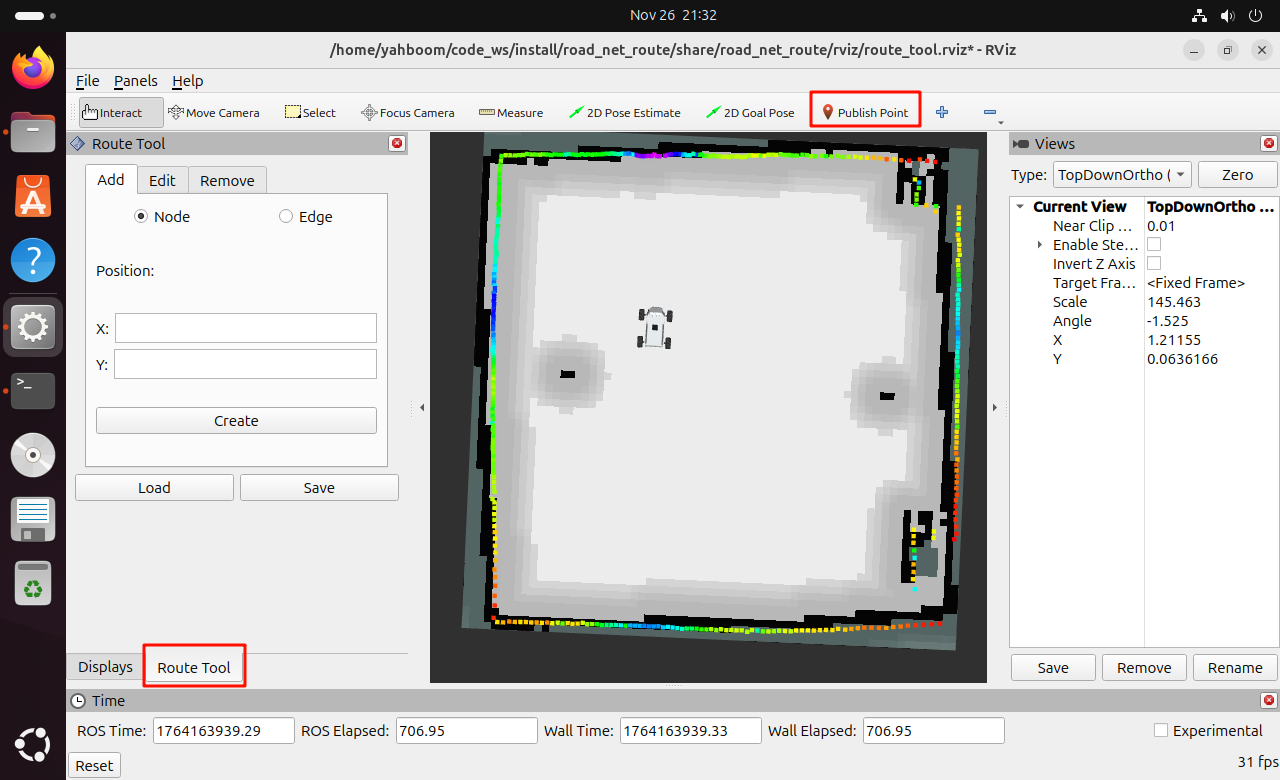 * 然后鼠标在小车中心点击一下鼠标左键,左下方的`Route Tool`选项卡中的`position`会自动填入当前点的坐标,然后点击`Create`创建,即可创建一个路点 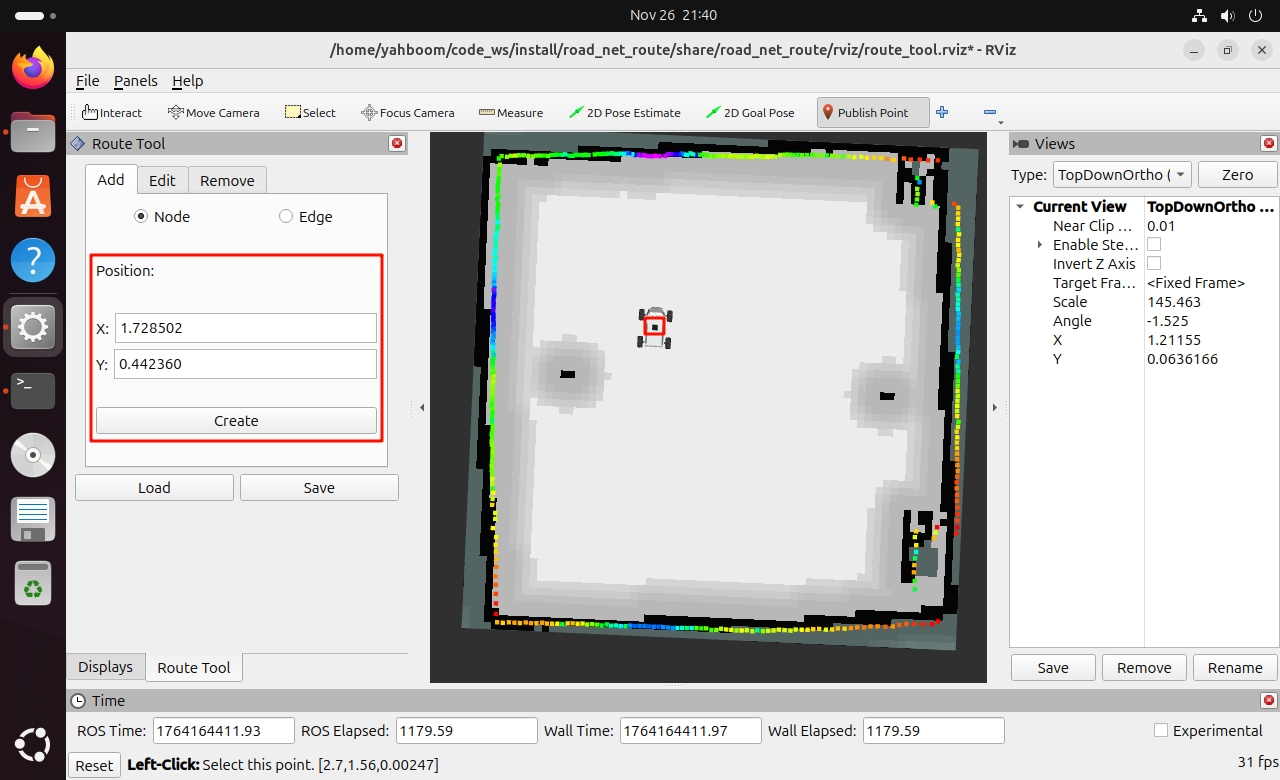 * 之后我们将车机移动到下一个需要标记路点的位置,这里示范中是直接将车机移动到下一个需要标记路点的位置 >i **信息提示** > > 这里移动机器人车机可以通过键盘控制、手柄控制、rviz中的2D Goal Pose导航 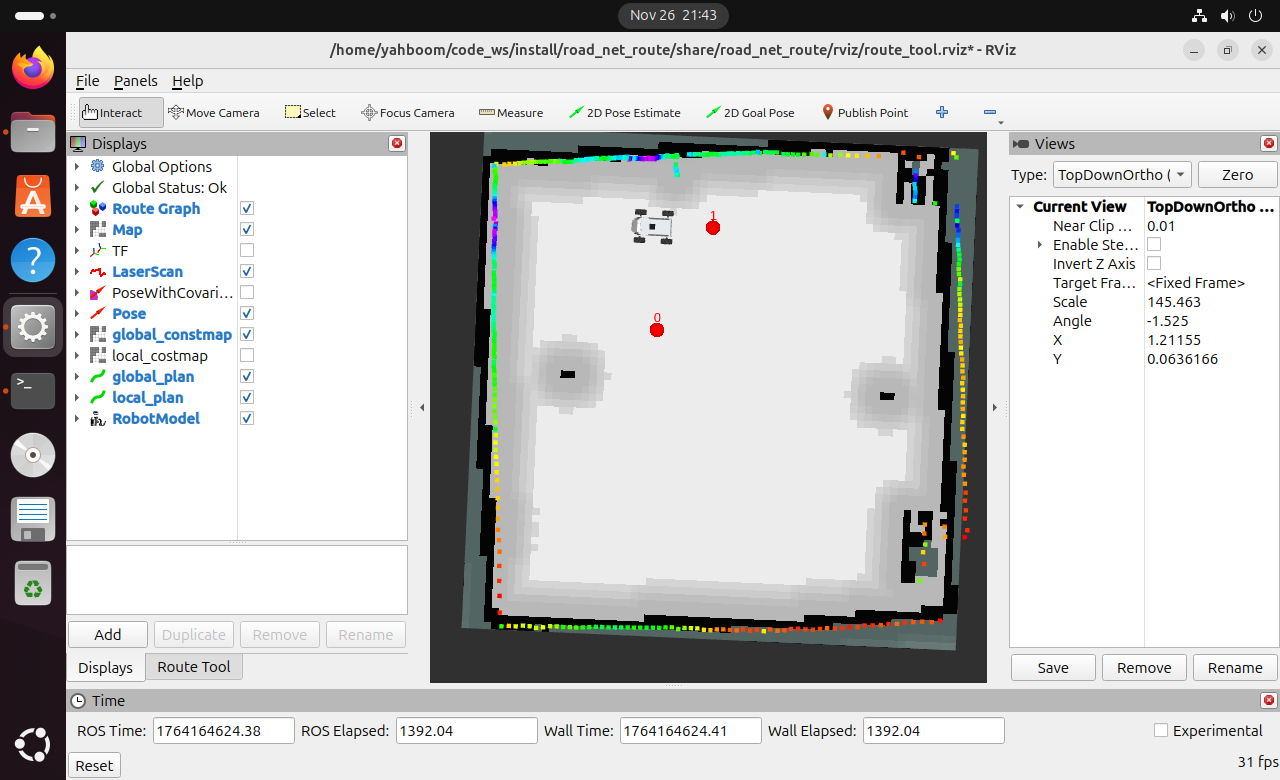 >w **警告提示** > > 这里定位原理是利用amcl全局定位和位姿地图进行匹配 > 注意:当后续在标记路点过程中如果观察到激光轮廓和地图环境特征出现偏差的时候(因为里程计会存在累计误差、或者是车轮打滑等导致局部定位出现误差 ),可以先移动旋转运动一段距离,让amcl定位发挥作用,让雷达激光轮廓数据完全匹配地图。 * 重复以上步骤,直到完成所有需要标记的路点(根据用户自己实际需求标注路点) 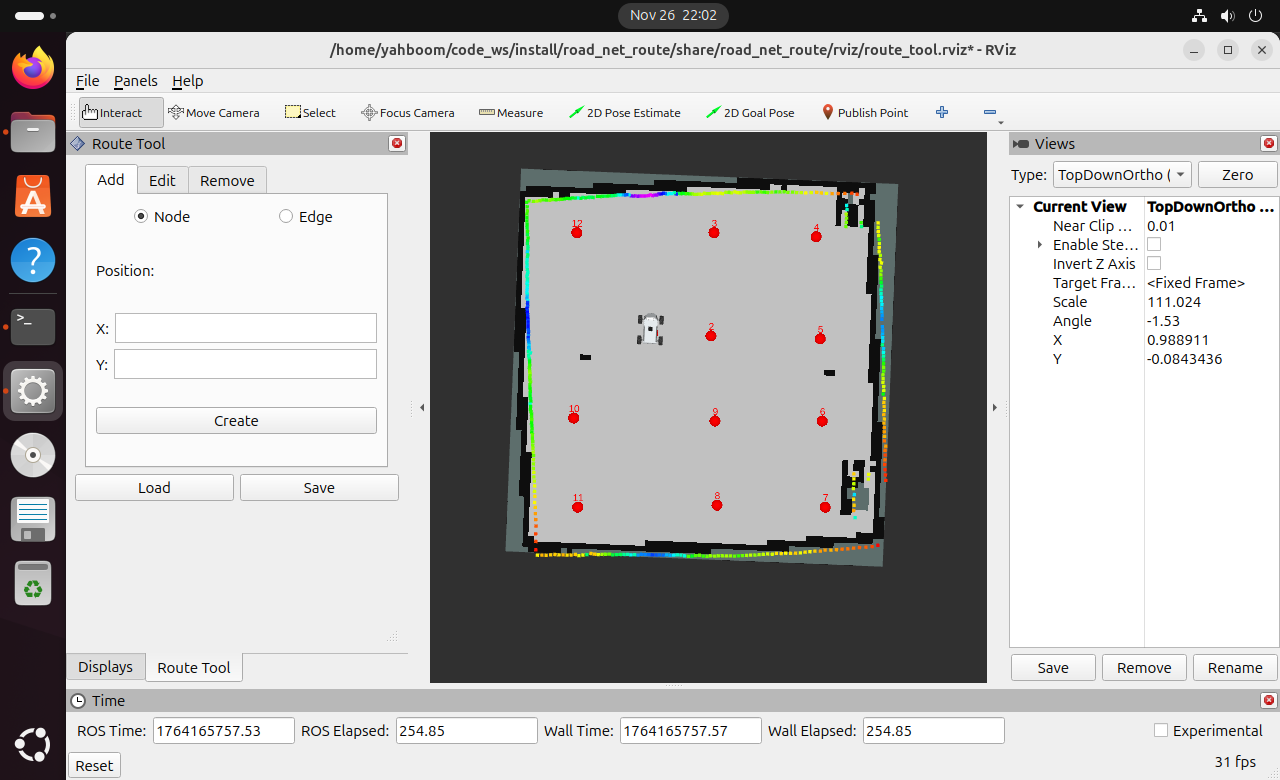 ### 2.3 添加边 * 在`Route Tool`选项卡中选择Edge 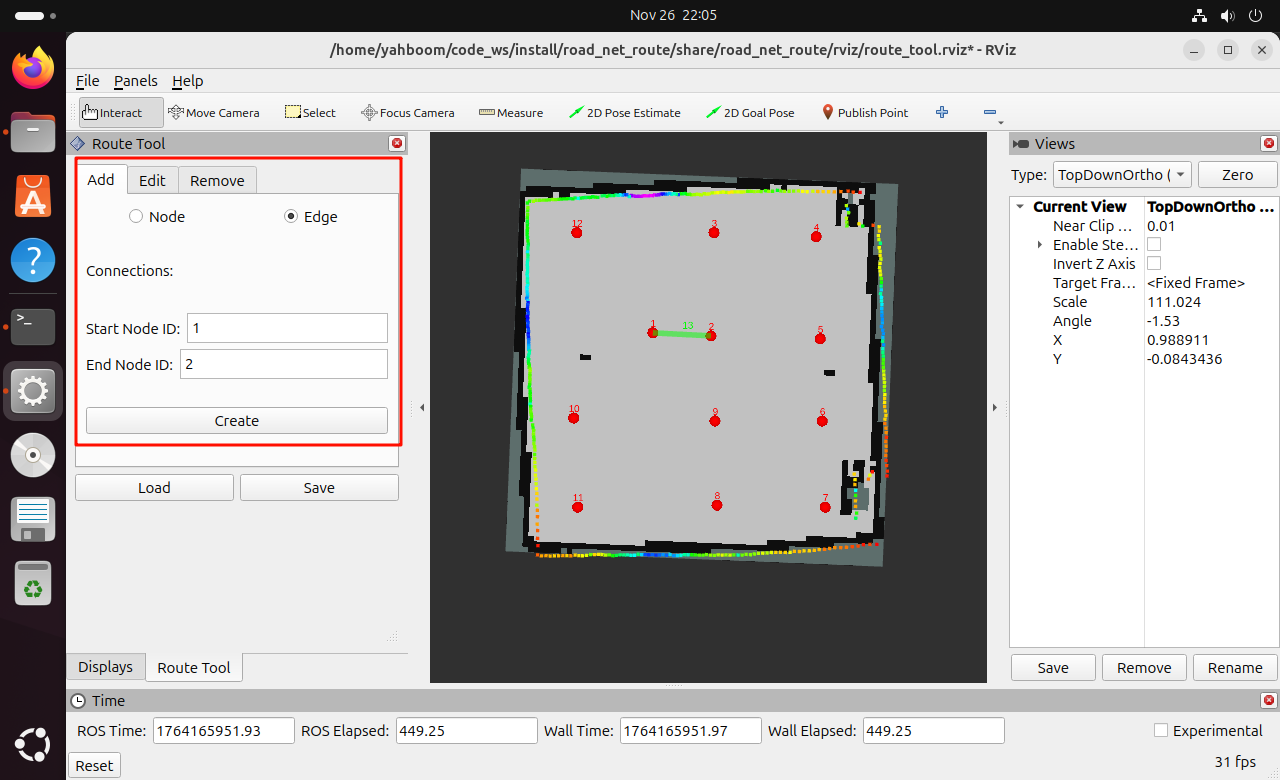 * 在`Start Node ID`中填入边起始路点,在`End Node ID`中填入边的结束路点,然后点击`Create`,即可创建一条路点之间的边 >i **信息提示** > **注意!!!** > **路网是点和边组成的拓扑结构,边是有方向的**,这里创建1-2的边是单向的,如果需要双向边,还需创建2-1的边。 * 之后我们再创建2-1的边,使路点1和2之间能够双向行驶 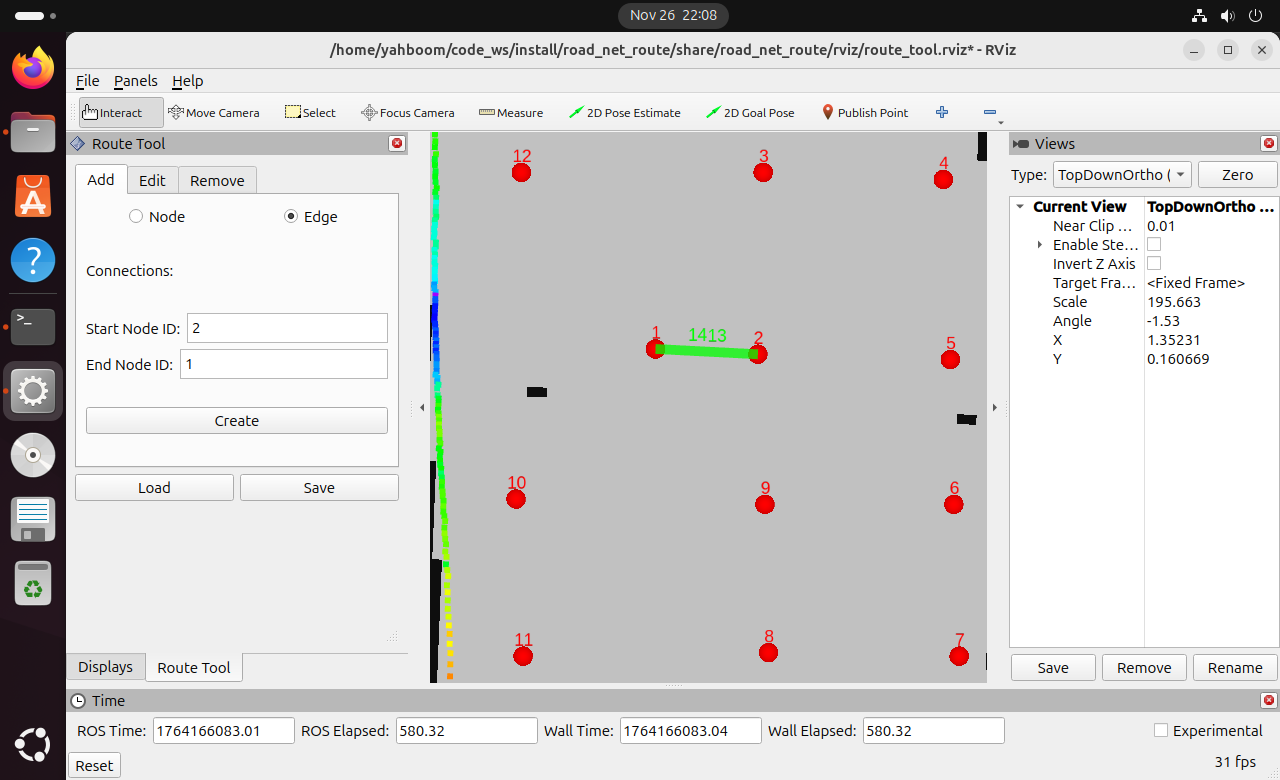 * 重复上述步骤,完成所有的边的创建(这里创建边时是单向还是双向边根据用户的实际需求决定) 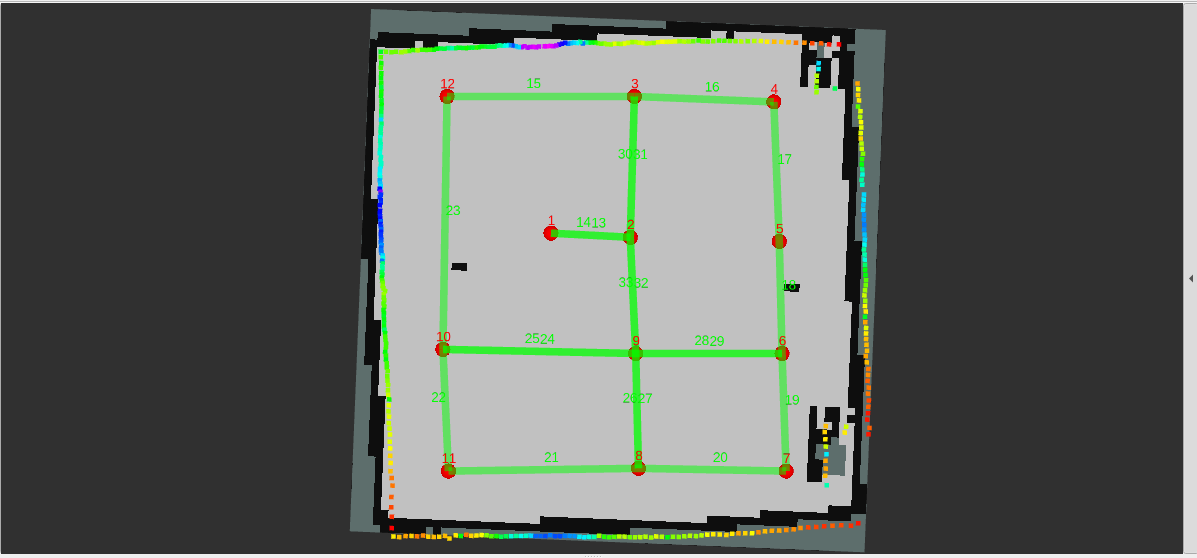 ## 3. 保存路网描述文件 * 在`Route Tool`选项卡中点击`save`,然后在弹出的窗口中选择要保存文件的路径,这里选择我们直接覆盖掉这个`map.geojson`,保存在该路径 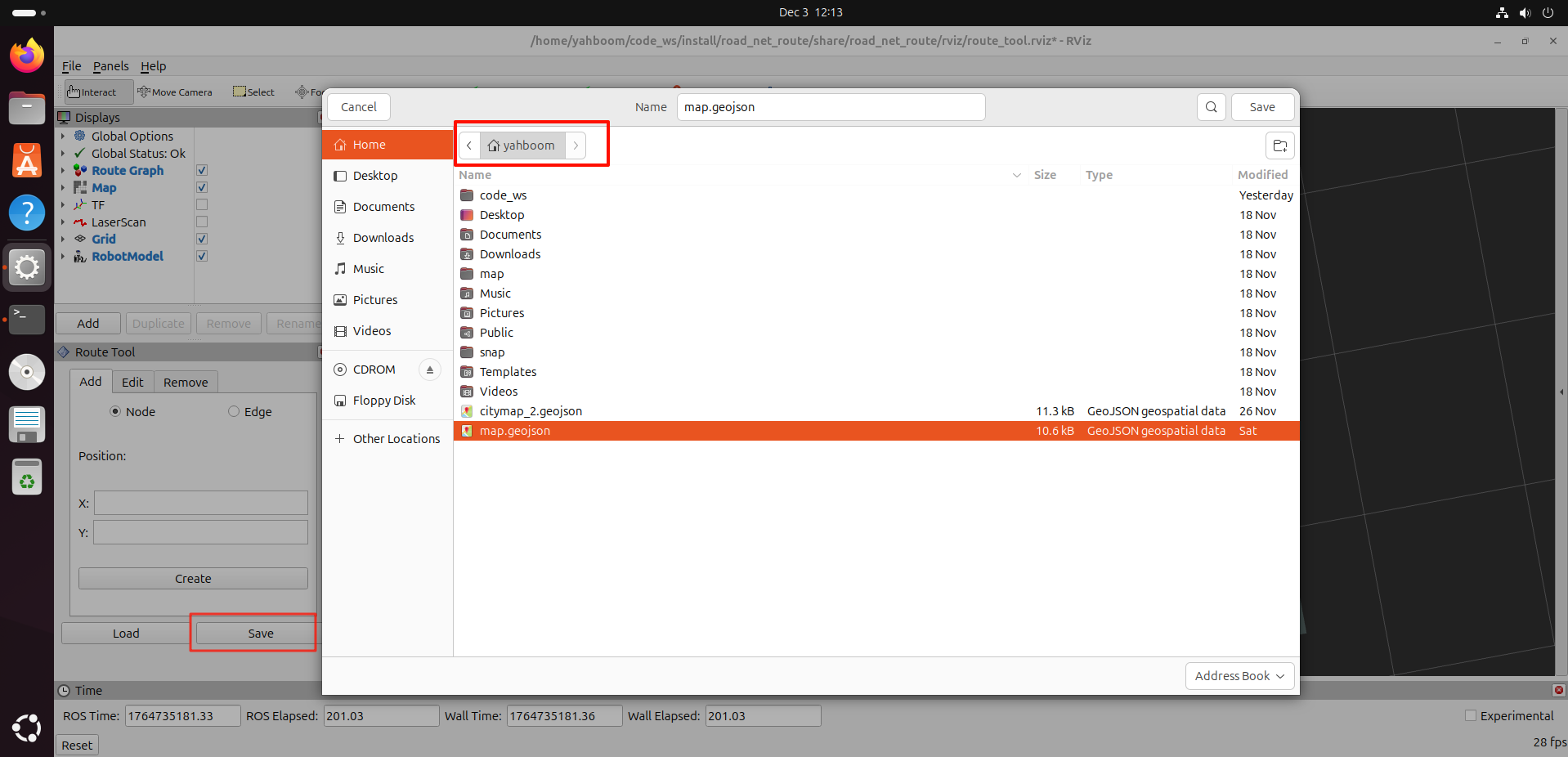 * 通过 `scp map sunrise@192.168.11.78:~/map/` 命令**(用户名和ip填实际的)**直接传输到宿主机`~/map`路径,因为这个路径和docker容器内的 `/root/map`路径绑定,也可以自己从虚拟机中拖出来再传到宿主机上面 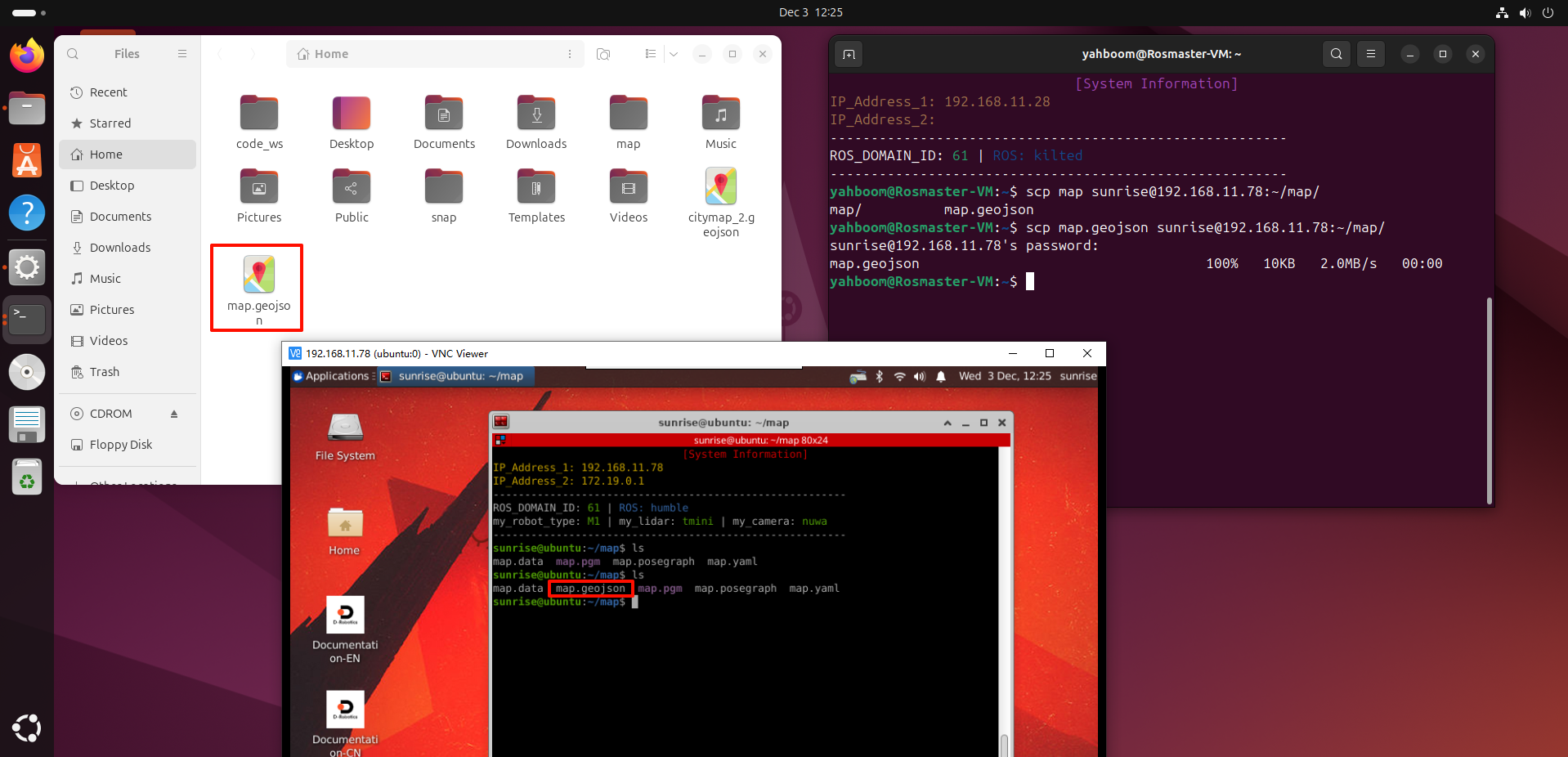 * 如不选择覆盖,也可以在File name中自行填入文件名称,建议和栅格地图名保持一致方便区分,文件后缀一定要填.geojson。最后点击`save`即可保存路网描述文件 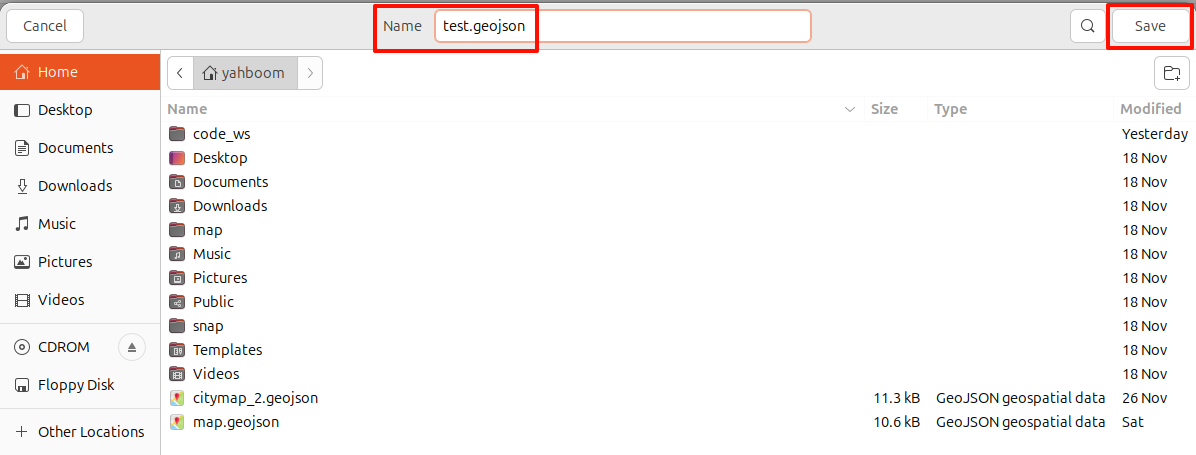 * 保存成功后终端会打印提示信息  * 之后我们可以查看`map.geojson`路网描述文件,文件中是对路点和边信息的json格式描述 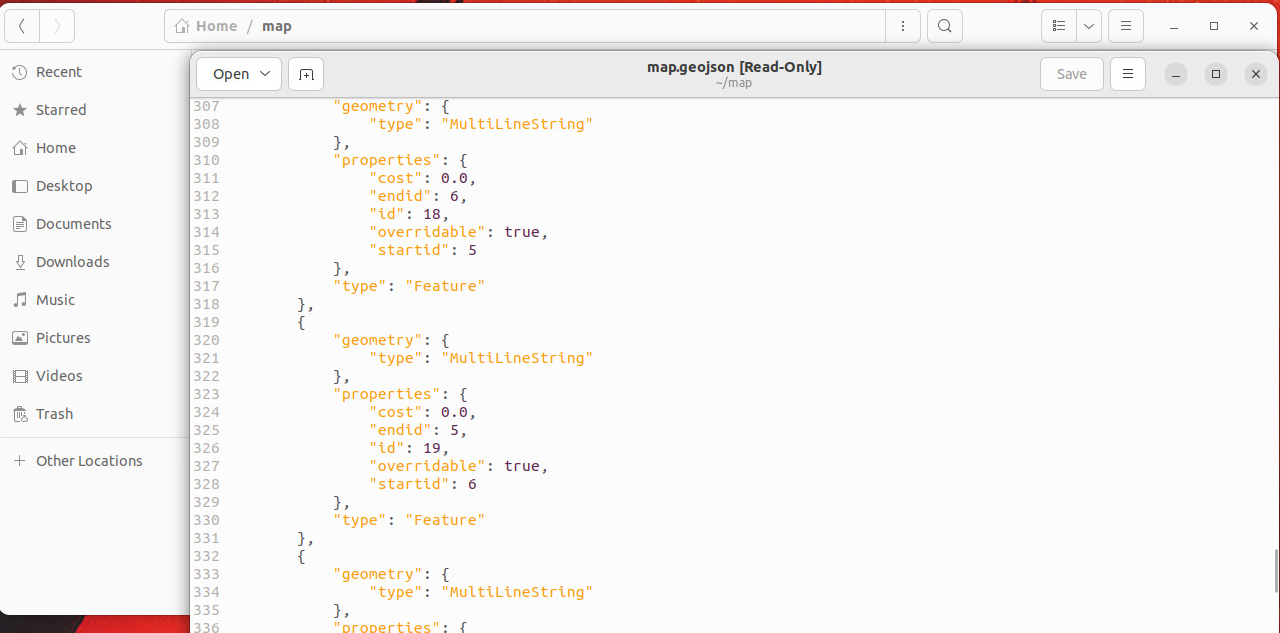 ## 4.载入和修改路网描述 ### 4.1加载路网描述文件 >i **信息提示** > > 如果后续需要修改之前的路网描述文件,例如添加、移除、编辑点、边,可以载入之前的路网描述文件进行编辑 仍然是按照2.1 启动导航节点启动之后, * 在`Route Tool`选项卡中点击Load,然后选择需要编辑的路网描述文件,点击`open`进行加载 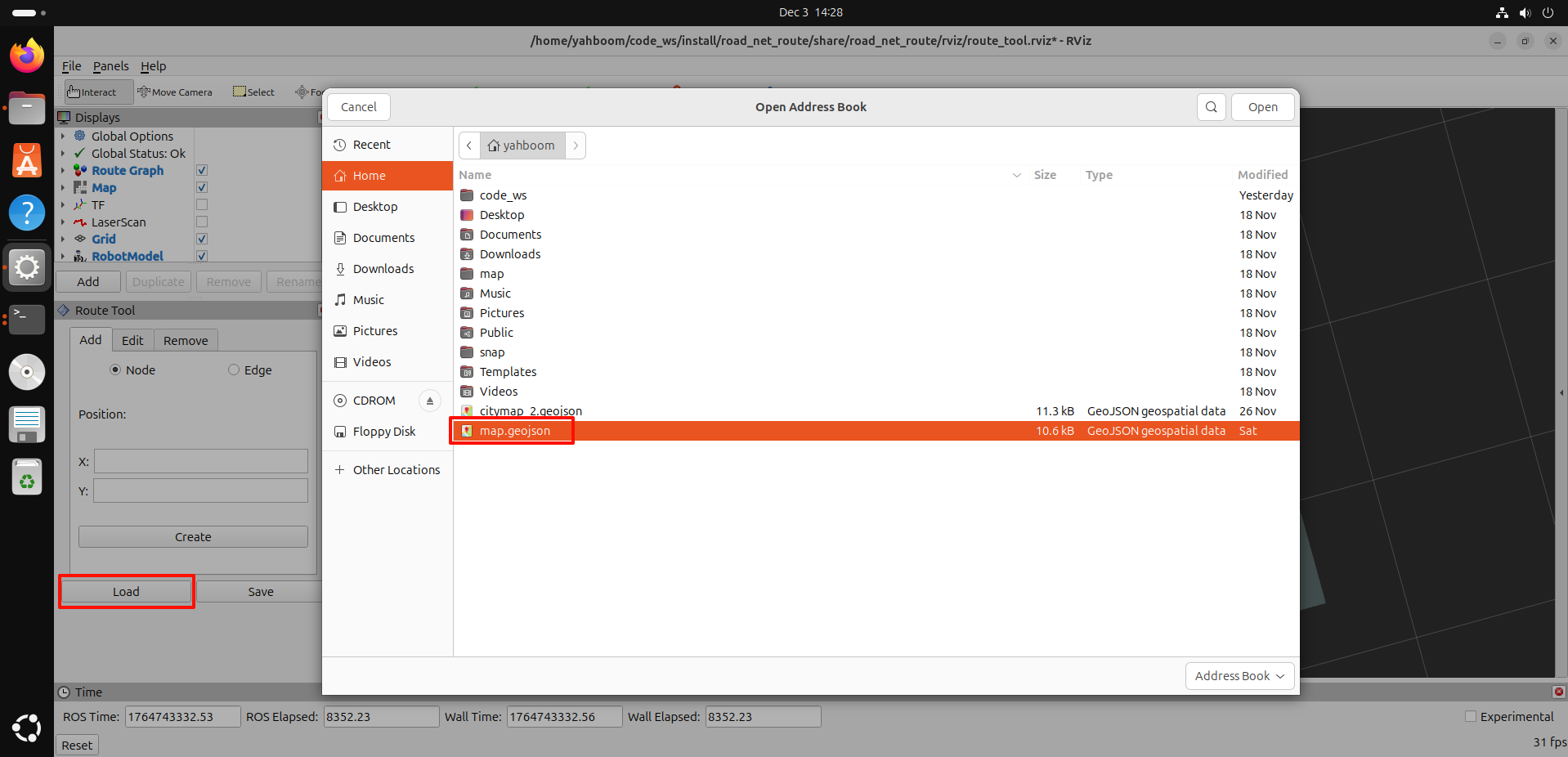 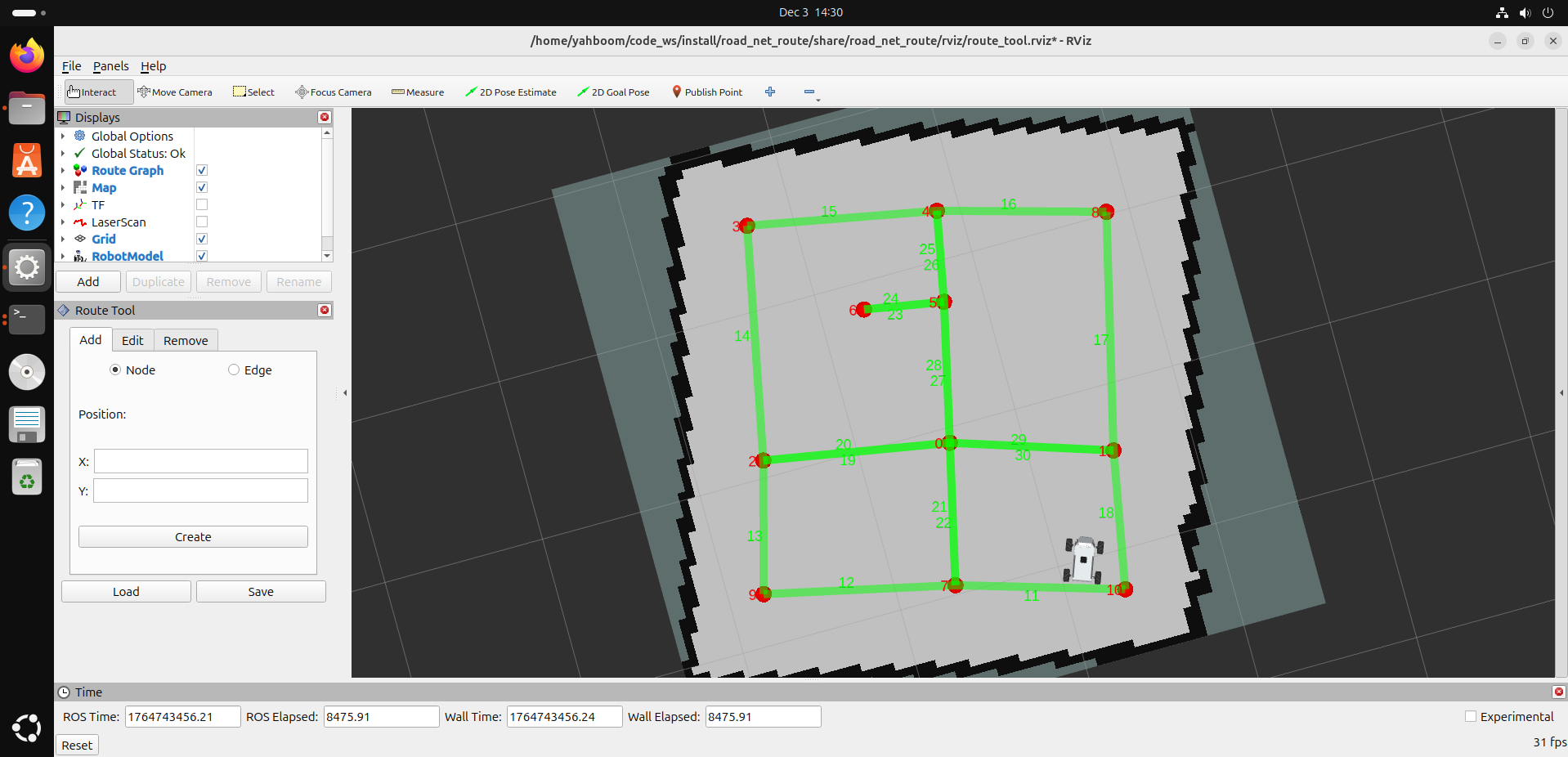 ### 4.2 编辑路网 * 如果需要新加路点和边,操作和前边一致 * 点击`Edit`(编辑路网),可以对现有的路点或边进行重新编辑 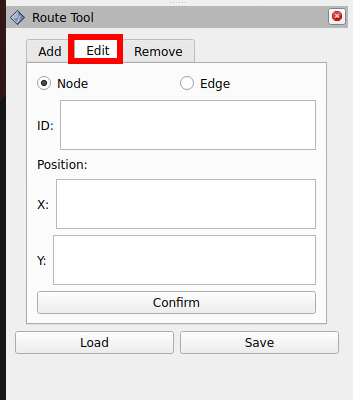 * 点击`Remove`(删除路网),可以对现有的路点或边进行重新编辑 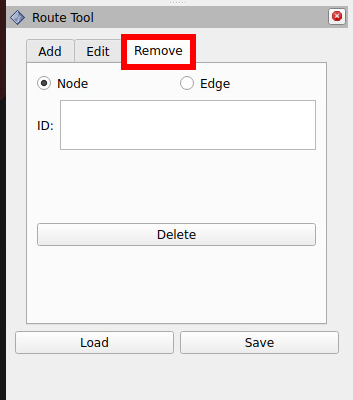
admin
2025年12月15日 10:02
161
转发
收藏文档
上一篇
下一篇
手机扫码
复制链接
手机扫一扫转发分享
复制链接
Markdown文件
Word文件
PDF文档
PDF文档(打印)
分享
链接
类型
密码
更新密码
有效期
AI