2026信息素养
2026智能博物赛项
RobotMasterB类机器人教程
智能博物扩展版使用说明
AilyBlockly零基础入门指南
Arduino代码电机编程
B类机器人比赛核心流程控制
汝城县职业中等专业学校知识库-信息中心朱老师编辑
-
+
首页
RobotMasterB类机器人教程
ROBOTMASTER EB 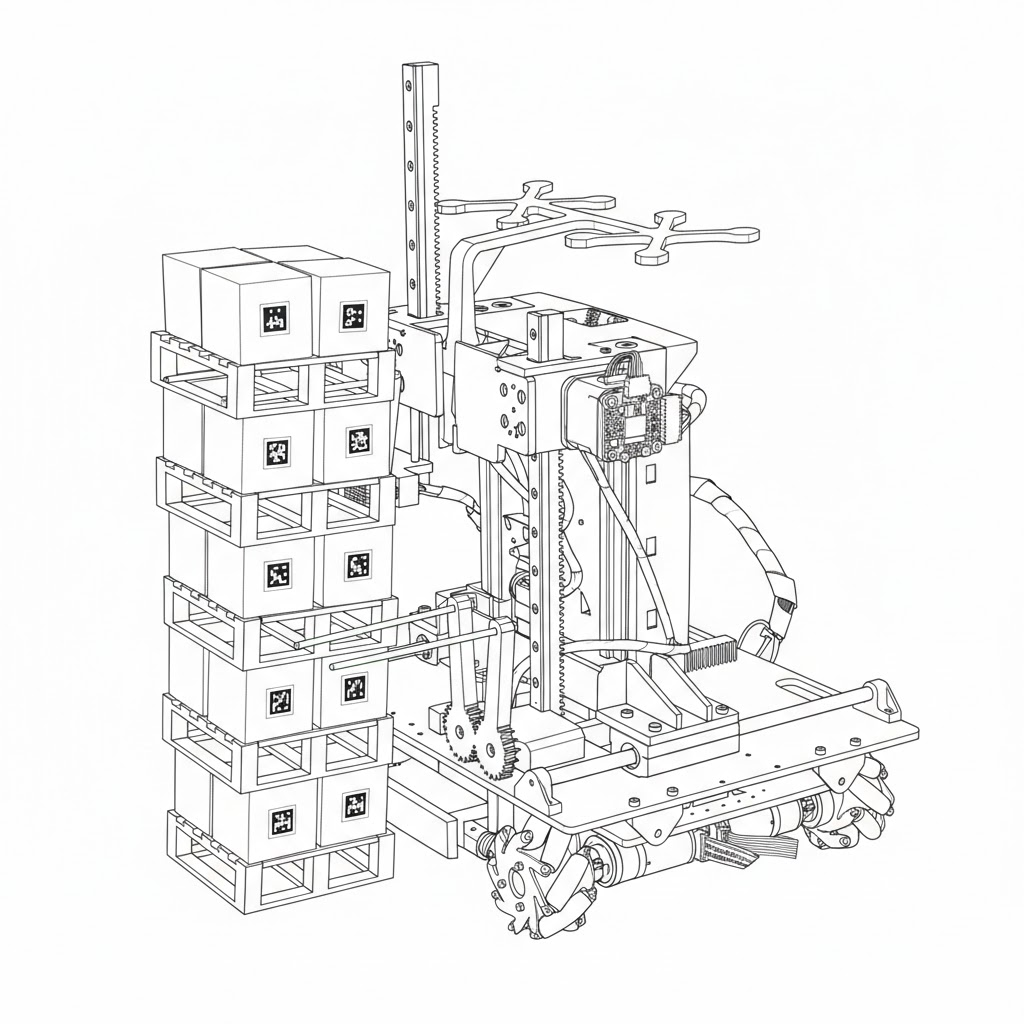 ## 目录 [1\. 基础介绍 3](#_Toc52k4ei) [2\. 准备 4](#_Toc2q4u81) [3\. 连接模式 6](#_Toc45r9xs) [4\. 面板介绍 7](#_Tocw22lbp) [5\. 代码介绍 7](#_Tocsqkfw9) [6\. 状态灯介绍 10](#_Tocbxsfq5) [7\. 单双车模式 11](#_Tocl3mujg) [8\. 地图设置 11](#_Tocf1tuxu) [9\. 航点设置 14](#_Tocryd8ol) [10\.夹爪角度 16](#_Toc5riz93) [11\.机械臂系统设置 17](#_Toc9po9v1) [12\. 异常处理 19](#_Toc1tyj38) [13\. IMU 校准 19](#_Toc930s0u) [14\. 竞赛指南 19](#_Tockw03ld) ## 基础介绍 ### 1.1功能亮点 **RobotMaster EB** 是一款面向具身智能(Embodied AI)教育的高性能机器人平台。它集成了先进的感知、决策与控制系统,旨在为开发者提供一个从视觉感知到物理操作的完整实验环境。其型号分为EB1(小学组)、EB2(初中组)、EB3(高中组)。 * **核心控制**:基于 ESP32-S3和GD32 高性能微控制器与 RDK X3,ROS 2 机器人操作系统。 * **底盘系统**:采用麦克纳姆轮设计,支持 360° 全向平移与自旋。 * **动力系统**:搭载 EmmV5 高精度步进电机,确保运动控制的细腻与精准。 * **机械装置**:配备多轴机械臂与精密夹爪,支持复杂搬运与操作任务。 ### 1.2部件名称及机器坐标系 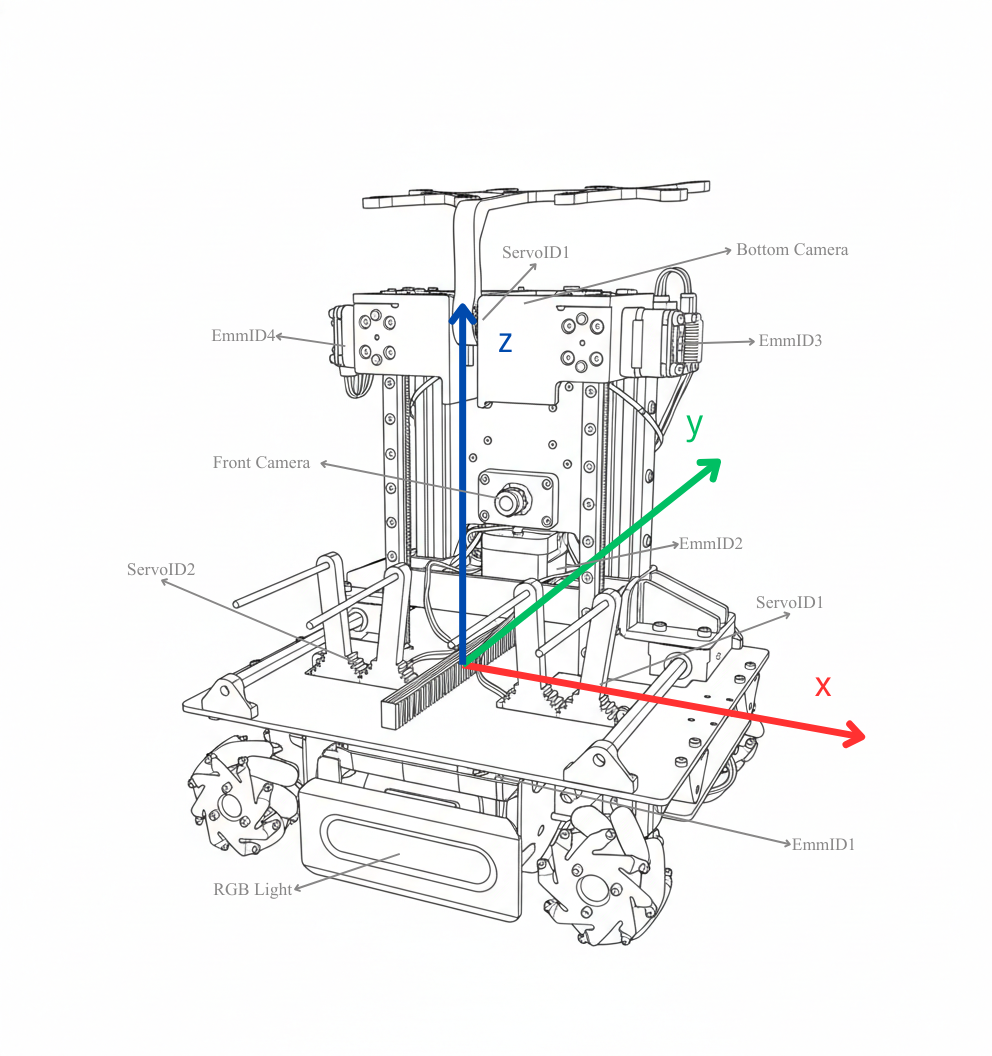 机器坐标系为右手系,如图所示红色为x轴,绿色为y轴,蓝色为z轴,其中IMU旋转角度逆时针为正,顺时针为负。车体包含4个Emm步进电机,ID顺序如上图所示,3个舵机,ID顺序如上图所示。2个1080P相机,1个RGB灯板,4个麦克纳姆轮及配套电机,1个主控版,1个附属板,1个RDK X3。 ## 准备 ### 2.1复位 1. 机械复位如图片1所示,Z轴线轨需要完全插到底,夹抓角度需要朝上。 上电前复位操作视频 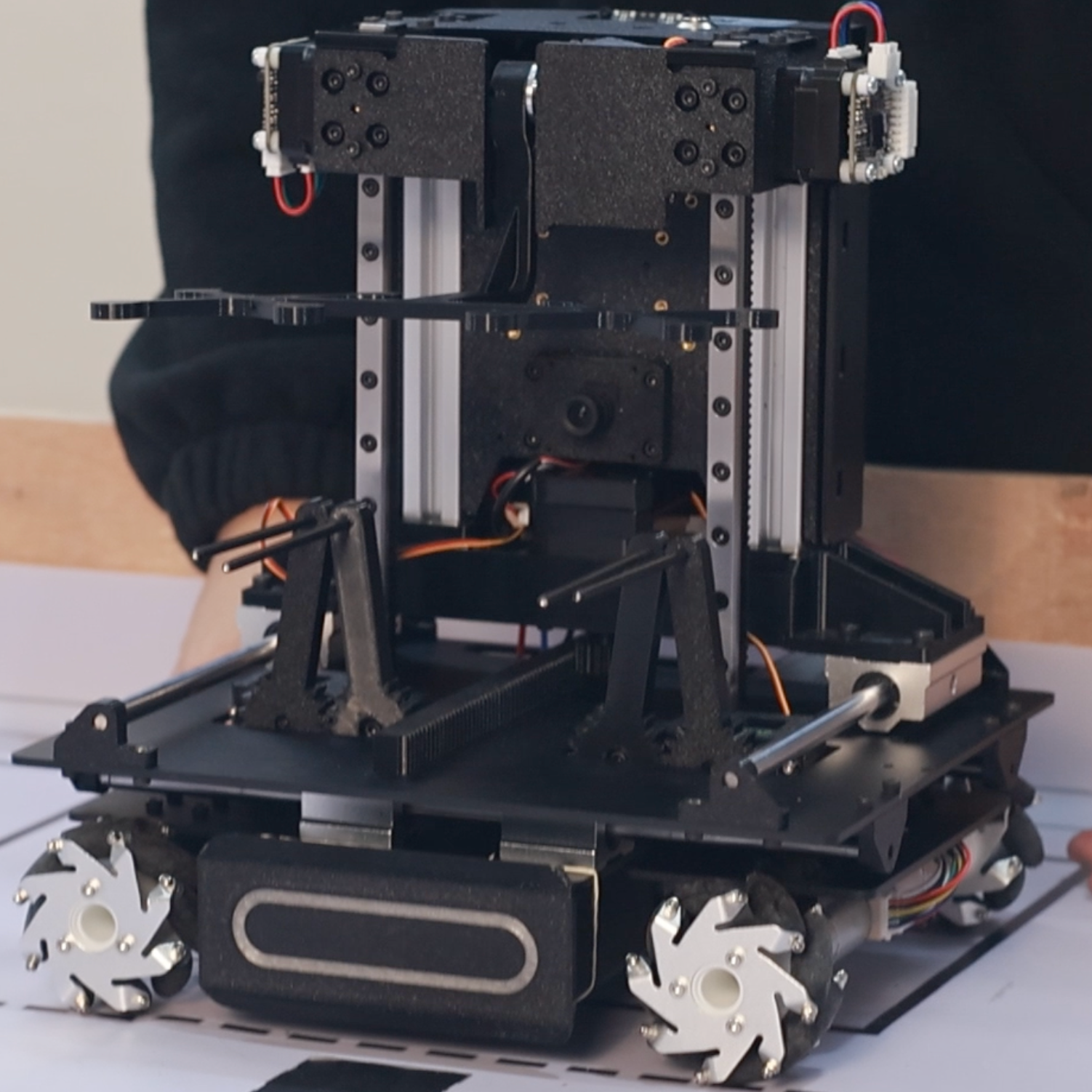 图片 1 ### 2.2电源使用 上电:安装电池并上电操作视频 充电:充电器电池必须使用官方充电器充电。 充电器上DC圆口插入电池中。使用电源线连接充电器到 100~240 V(50Hz/60Hz)交流电源上。 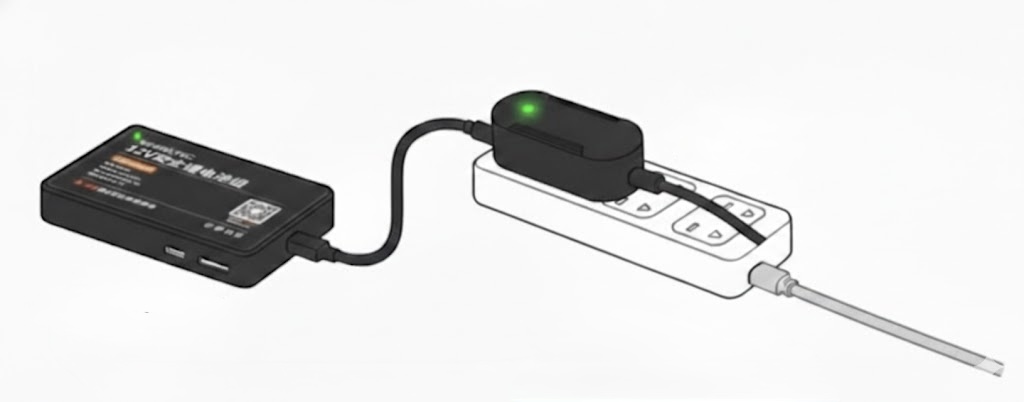 **开启电源:** 1. 打开灯板盖 2. 插入DC\-DC线使得电池和板子相连。 3. 板子开关拨向开,若车载RGB灯板出现青色呼吸灯,则说明正在启动,若出现青色RGB灯常亮,则说明启动完成。具体灯效含义请转移到5查看。 ## 连接模式 机器人支持两种主要的网络通信模式,可通过 **连接中心** 进行切换: | **模式** | **描述** | **应用场景** | | --- | --- | --- | | **直连 AP** | 电脑连接机器人散发的 Wi\-Fi 热点 | 单机调试 | | **路由器多机** | 机器人与电脑接入同一局域网,wifi模式下软件无法控制车,仅能做代码修改 | 双车模式 | **AP连接步骤:**电脑wifi连接上车的wifi后(名字为RobotMaster\+车唯一6位数编号),选择AP模式,并选对车的型号,在列表中点击“开始驾驶”即可连接到主控制界面(图片2)。 图片 2 **wifi模式连接步骤(仅购买双车方案适用):** 1. AP模式连上小车(按照上面步骤) 2. 打开设置(如图3),配置机器人默认连接wifi 3. 附属板开关拨到wifi模式后重启 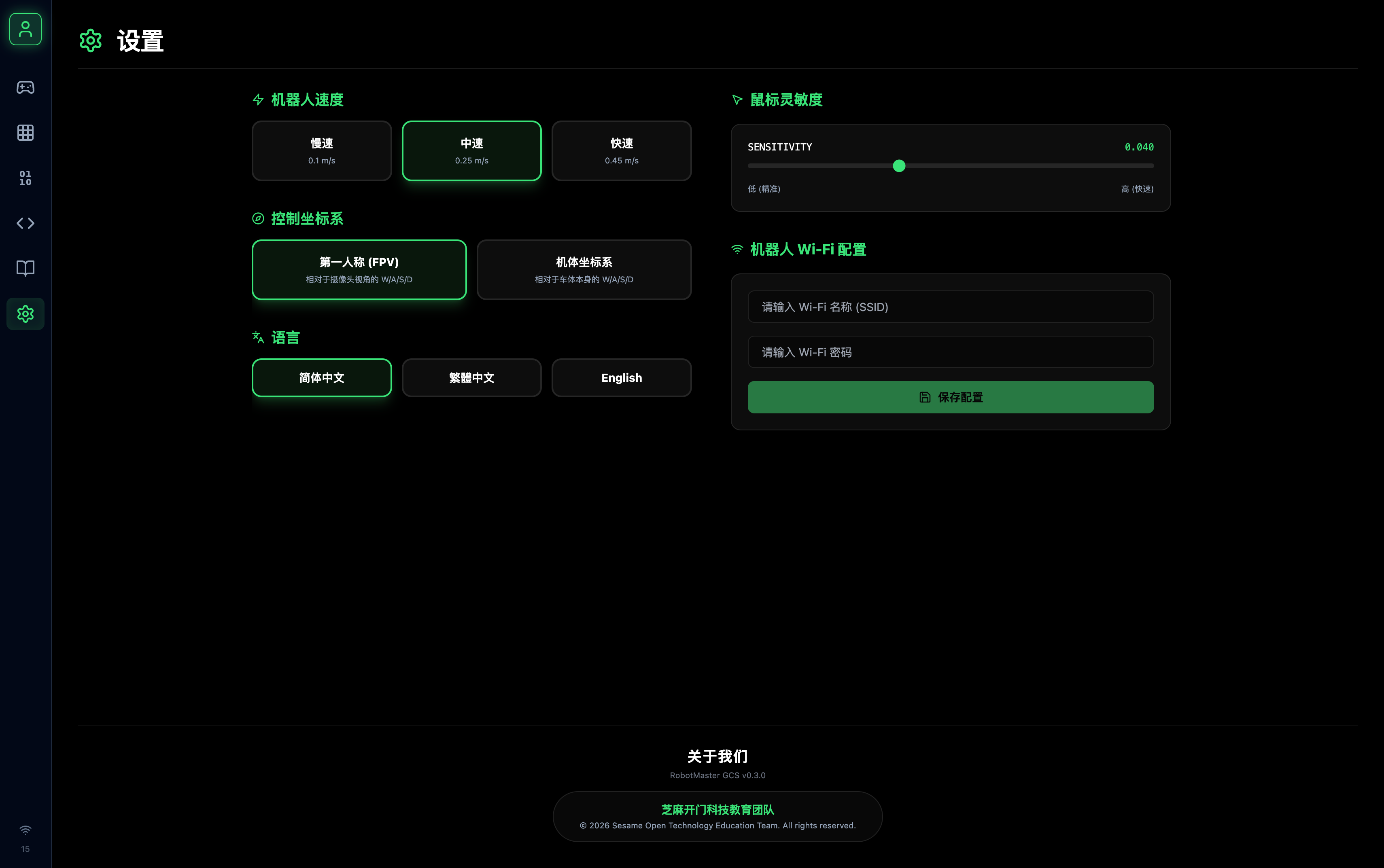 图片 3 ## 4\. 面板介绍 控制界面分为三个主要板块,覆盖了从基础驾驶到系统逻辑的全方位需求: 1. **连接中心 (Connection Hub)**:管理机器人连接、选择型号(EB1/EB2/EB3)及 Wi\-Fi 配置。 2. **驾驶控制 (Drive View)**:实时的第一人称(FPV)操作界面,支持摇杆、键盘及 FPS 样式的鼠标转向。 3. **逻辑矩阵 (Logic Matrix)**:高阶功能面板,涵盖地图可视化、路径规划及比赛流程控制。 4. **代码实验室(Coding Lab):**专业级开发环境,支持直接访问和编辑机器人内部配置文件及源代码 5. **AI 助手 (AI Assistant)**:智能编程辅助工具,提供实时代码建议、问题诊断及学习指导。 6. **ESP32 Lab :** 可利用esp32 进行图形化编程。 ## 代码介绍【非竞赛需要】 RobotMaster EB 的软件系统基于 **ROS 2** 构建,采用模块化的包设计,每个包负责特定的功能模块。代码工作空间位于机器人的 /root/car\_ws 目录下,打开代码实验室就会默认进入到该目录,所有源代码均使用 C\+\+ 和 Python 编写。 ### 5\.1 ROS 2 工作空间结构 ROS 2 工作空间(Workspace)是组织机器人代码的标准方式,car\_ws 的结构如下: **核心目录说明**: * **src/**:唯一需要手动编辑的目录,包含所有源代码和配置文件 * **build/**、**install/**、**log/**:由 colcon build 自动生成,无需手动修改 ### 5\.2 代码编译与部署 **以下操作需精通ros2机器人操作系统,若编译出现失败,报错且无法复原,概不负责。** #### 5\.2\.1 编译工作空间 ROS 2 使用 colcon 工具进行编译: **参数说明**: * \-\-symlink\-install:使用符号链接而非复制,修改 Python 代码后无需重新编译 #### 5\.2\.2 仅编译单个包 若只修改了某个包(如 arm\_control),可加速编译: ### 5\.3 调试与日志 可在代码实验室的调试终端中输入控制指令 ### 5\.3\.1 查看节点运行状态 #### 5\.3\.2 监听 Topic 消息 ### 5\.4 代码修改指南 #### 5\.4\.1 修改配置文件(推荐) **无需编译**,修改后重启相关节点即可生效: * **航点调整**:**参考文档第9点**,编辑 competition\_waypoints.yaml并保存→ 重启机器 * **机械臂参数**:**参考文档第10点**,编辑 arm\_config.yaml并保存→ 重启机器 * **Tag 位置**:**参考文档第7点**编辑 tags.yaml 并保存→ 重启机器 * **相机曝光调整:参考文档第12点,**编辑camera.launch.py并保存→ 重启机器 #### 5\.4\.2 修改 Python 代码(不推荐,修改导致的任何问题概不负责) **使用 \-\-symlink\-install 编译时无需重新编译**,直接修改后重启节点: 1. 在代码实验室打开文件(如 arm\_action\_node.py) 2. 修改代码逻辑 3. 保存文件 4. 重启机器 #### 5\.4\.3 修改 C\+\+ 代码(强烈不推荐) **需要重新编译**: 1. 修改源文件(如 motor\_node.cpp) 2. 在终端执行: 3. 重启节点 #### 5\.5 获取帮助 遇到代码问题时,可通过以下方式获得支持: 1. **AI 助手**:在代码实验室中直接询问(如"这个函数的作用是什么?") 2. **ROS 2 官方文档**:https://docs.ros.org ## 6\. 状态灯介绍 机器人侧面配备 16 颗 WS2812 RGB 可编程状态灯环,用于反馈系统当前状态: 状态灯含义讲解视频 : https://pan.baidu.com/s/1FM5bZ9AdiXYLMKQ\-xPoq1A?pwd\=bcjd 提取码: bcjd 单车模式下: * **呼吸青光**:系统正在启动。 * **红色跑马灯:**系统启动完成**** * **红光常亮:**比赛程序开始执行 * **呼吸黄光:**电池电量不足 双车模式下: * **呼吸青光**:系统正在启动。 * **红色跑马灯:**双车通信连接中,为主车 * **蓝色跑马灯:**双车通讯连接中,为从车 * **呼吸红光**:系统启动完成,为主车。 * **呼吸蓝光**:系统启动完成,为从车。 * **红光常亮**:比赛程序开始执行,为主车。 * **蓝光常亮**:比赛程序开始执行,为从车。 * **呼吸黄光**:电池电量不足。 ## 7\. 单双车模式 双车的产品出厂默认已经配对好,如遇到特殊情况需要自行重新配对双车,可以参考以下流程 * 将需要配对的两台车背后的开发板开关都拨到"AP"处,查看两车的wifi名称(名字为RobotMaster\+车唯一6位数编号)。 * 连接到其中一台将要作为从车的设备,在RobotMaster软件端 **机器人Wi\-Fi配置** 中输入另外一台要作为主车设备的wifi名称,点击保存配置。 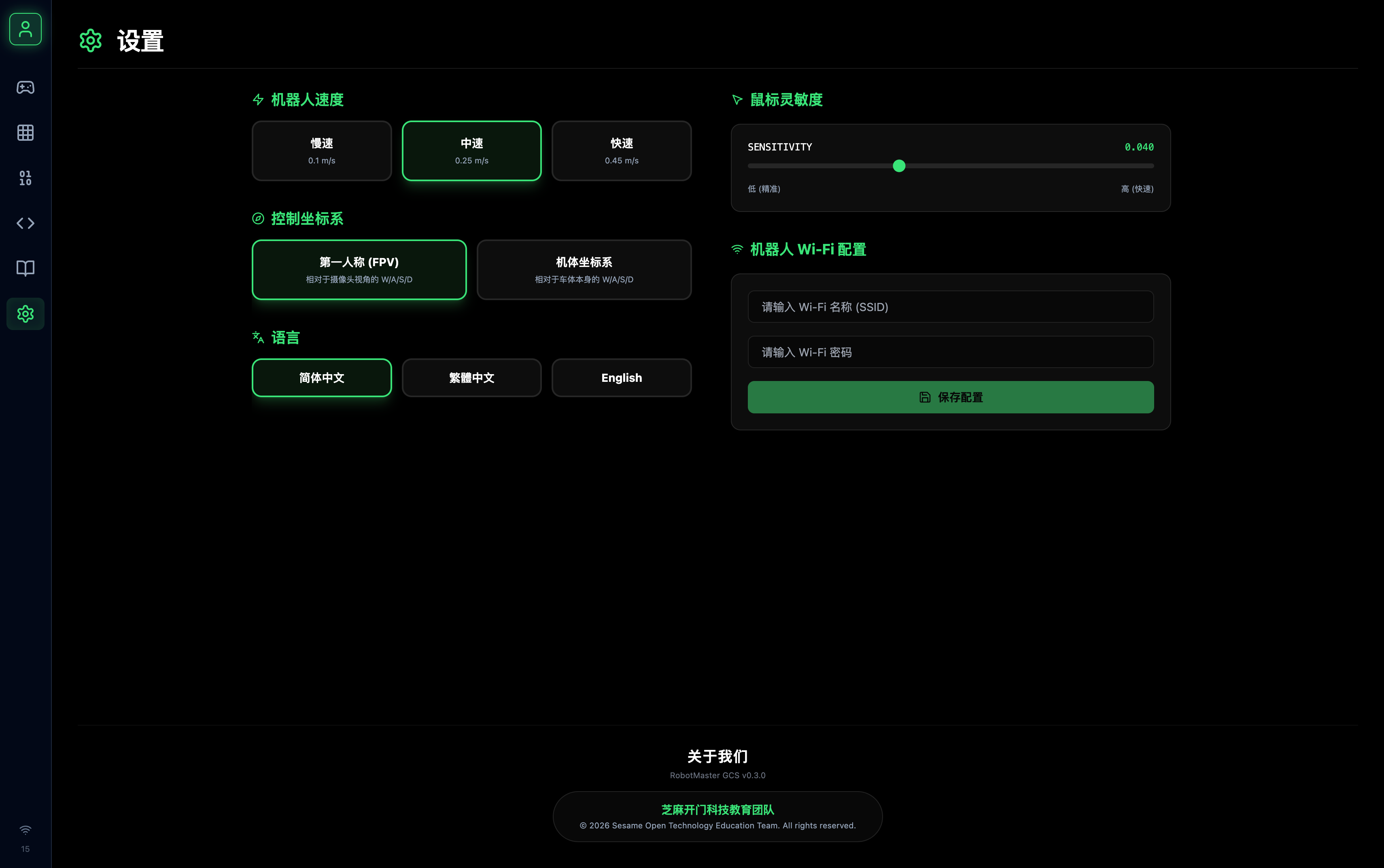 * 配置完成之后将机器关机,将从车背后的开发板开关拨到"WiFi",主车背后的开发版保持"AP",重新打开两台机器之后,两台机器即可自动配对。 ## 8\. AprilTag设置 在 **逻辑矩阵** 中,系统使用标准的底层物理坐标系来统合机器人位姿与地图信息: * **坐标原点 (Origin)**: **位置**:地图的 **左下角** (Bottom\-Left) 定义为坐标原点 (0, 0\)。 + **单位**:所有坐标均以 **米 (m)** 为单位。 + **范围**:标准比赛场地 定义为 2\.4m x 2\.4m 的正方形区域。 + **轴向**:X 轴(水平向右为正),Y 轴(垂直向上/向前为正)。 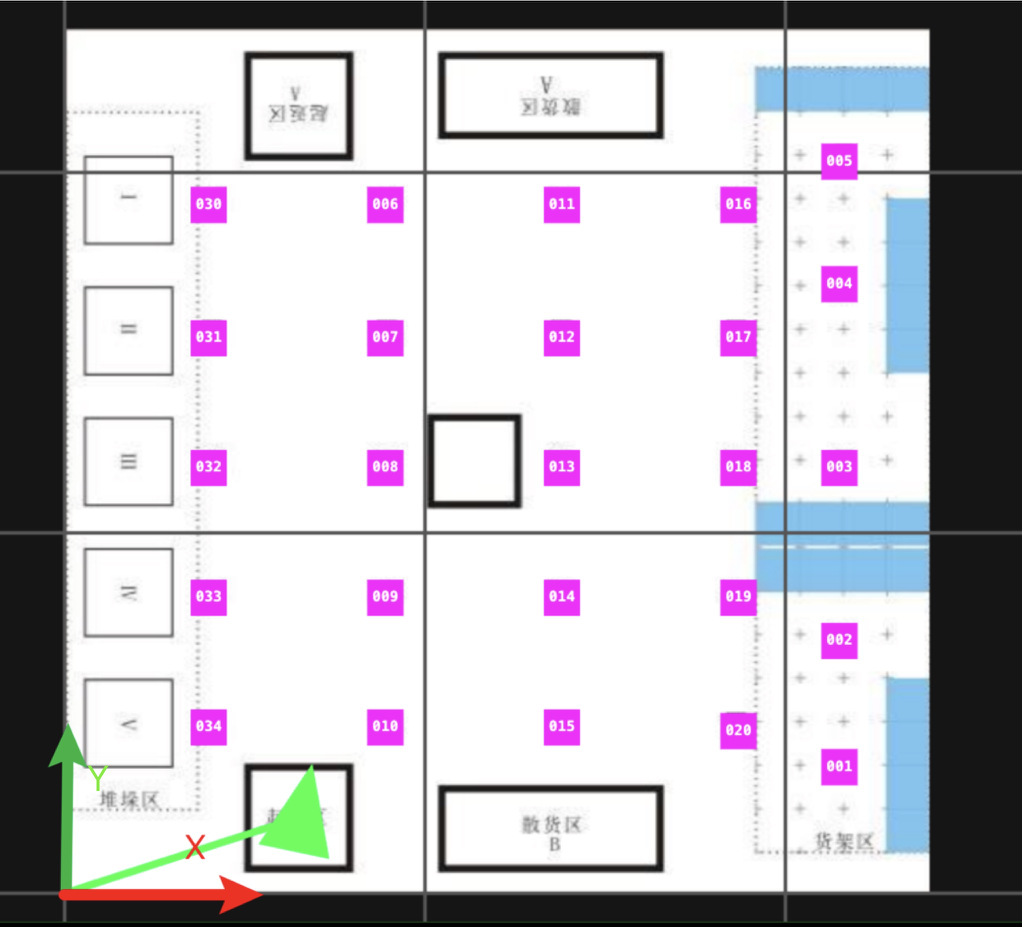 图片 4 ### 地图AprilTag配置 #### 什么是AprilTag? AprilTag是一种视觉基准系统,常用于机器人、增强现实和相机校准等领域。它由一个黑色的方形边框和内部的白色像素网格组成,每个AprilTag都有一个唯一的ID,可以通过算法快速检测和识别。算法可检测AprilTag基于相机坐标系的**坐标和姿态角度(如图片5所示)。** 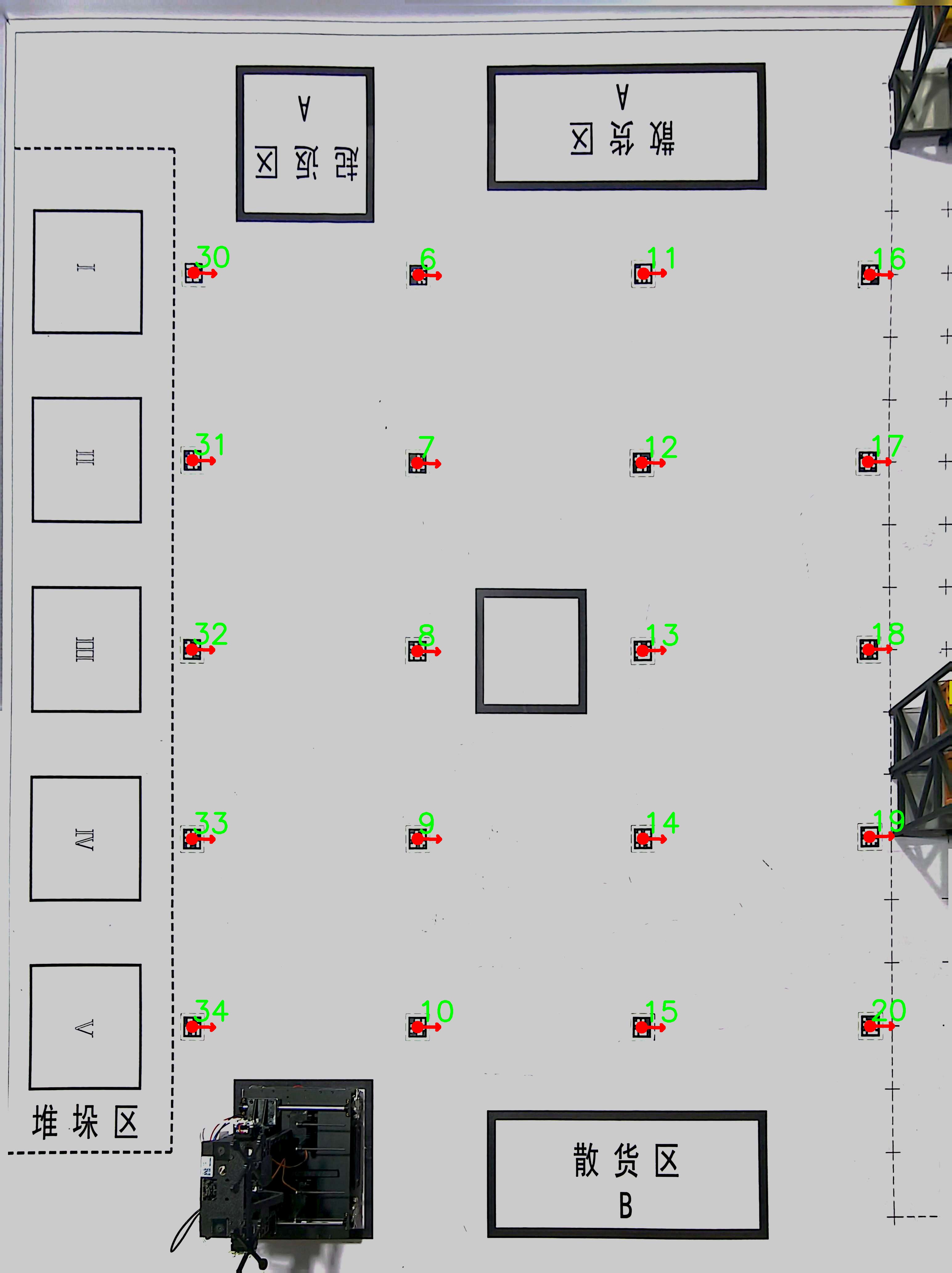 图片 5 综上,机器人利用分布在场地上的 AprilTag 标签进行精准的全局重定位(Relocalization): * **获取Tag位置及姿态** 使用苹果手机软件Quanti或使用Tag采集设备及其配套软件,如图片6所示,相机姿态正对tag,并在软件中查看tag的姿态,如图7所示。Tag识别器软件的使用教程视频 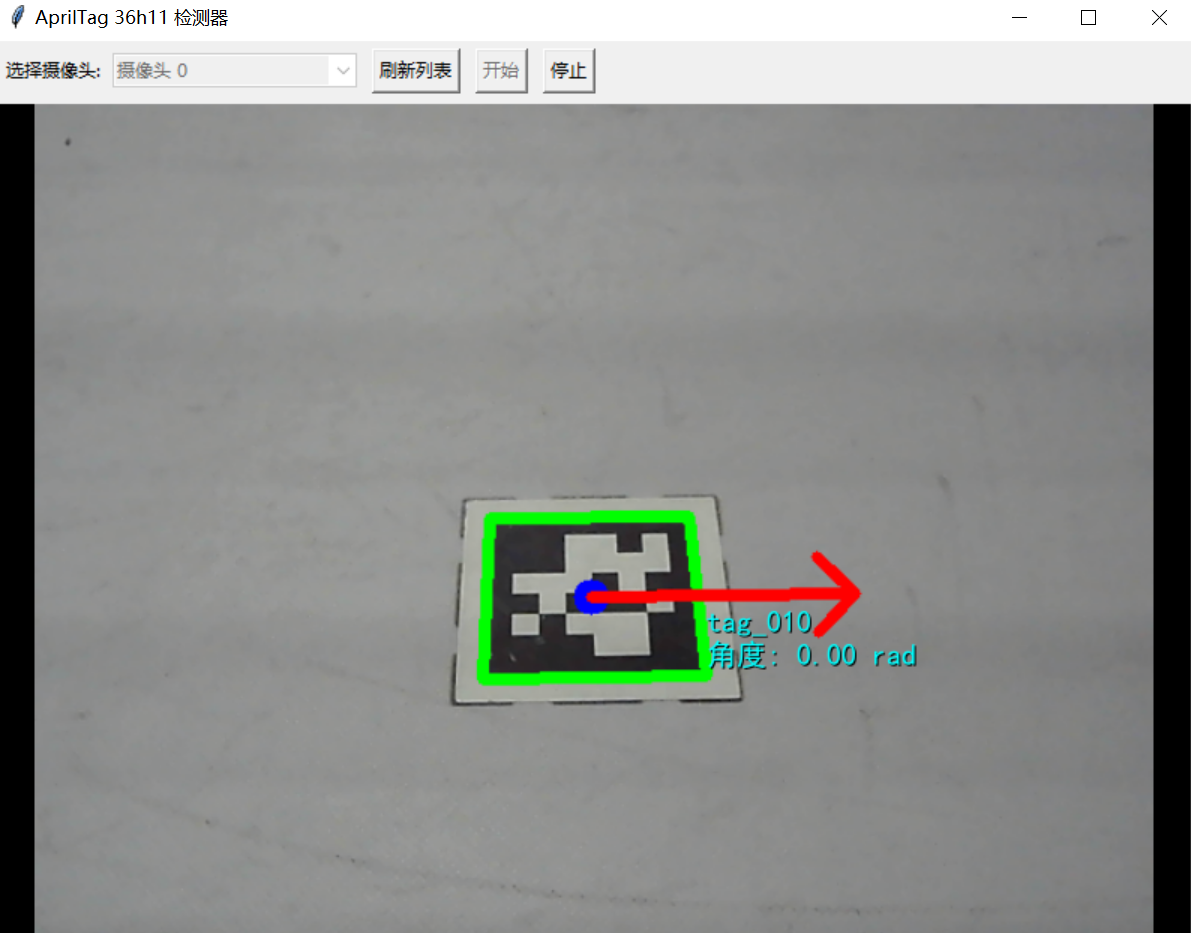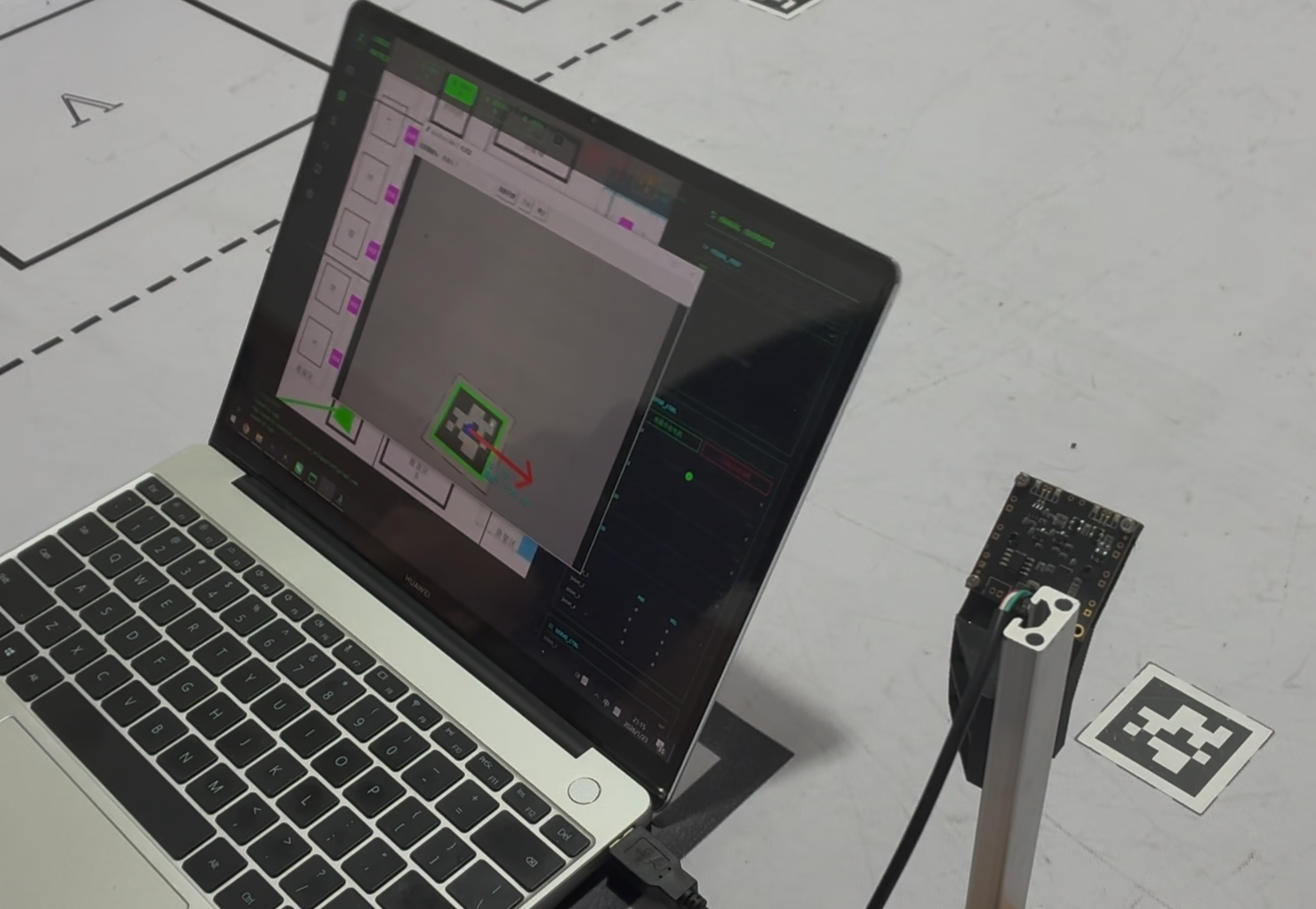 图片 6 图片 7 * **设置位置**:在“逻辑矩阵”界面点击顶部的 **编辑标签** 按钮进入编辑模式。 * **配置参数**: + **Tag ID**:必须与物理张贴的标签 ID 一致。 + **坐标 (X, Y)**:标签中心点相对于左下角原点的米制距离。 + **朝向 (Yaw)**:标签的旋转角度。Yaw 为 0 rad时表示标签正向指向地图 X 轴正方向,3\.14rad指向地图 X 轴负方向;Yaw 为 1\.57rad时指向地图Y 轴正方向, \-1\.57rad时指向地图Y 轴负方向。 * **交互方式**:在编辑模式下,点击地图上的标签图标即可弹出侧边参数设置页。设置好后点保存即可。 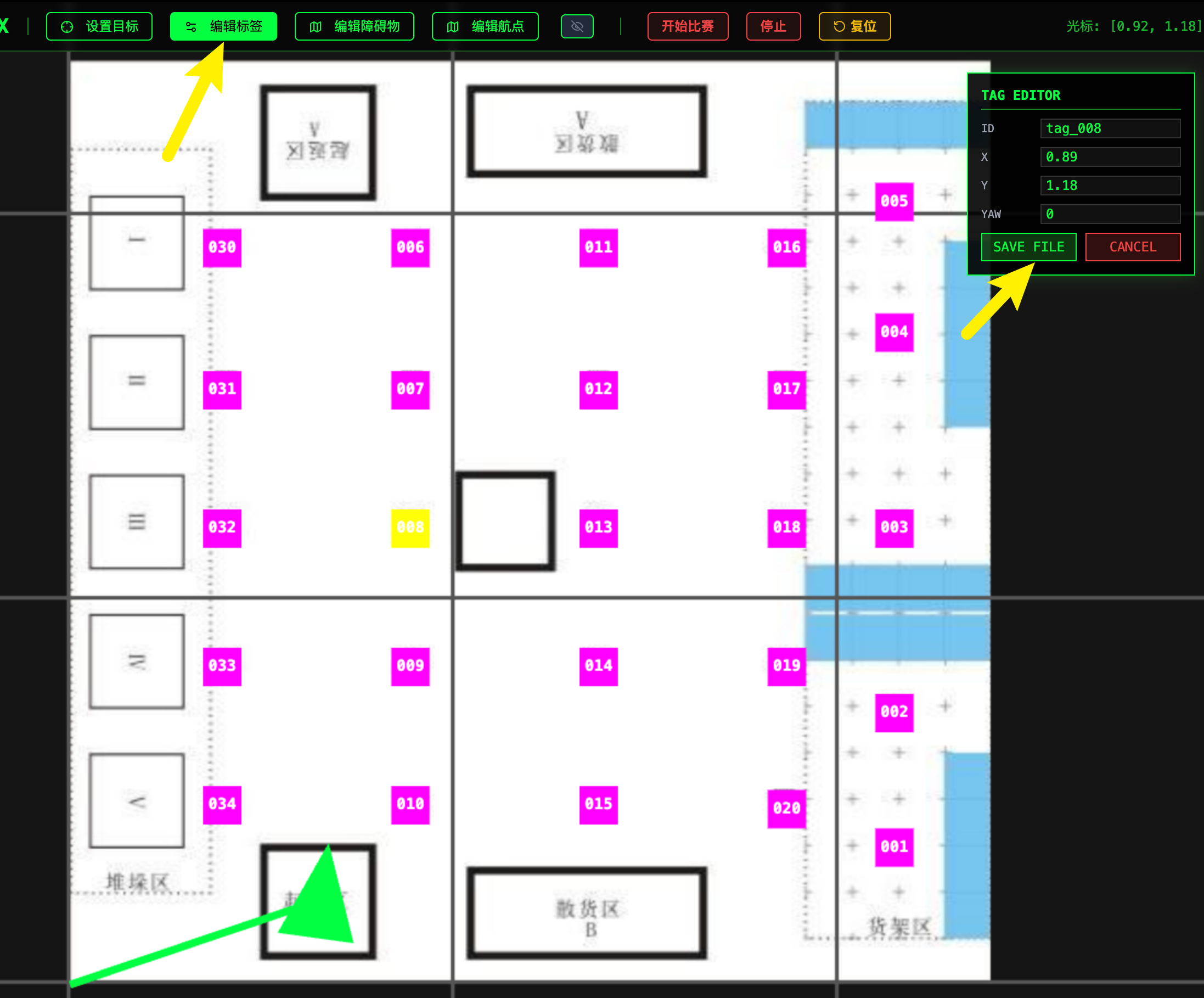 图片 8 * **持久化**:点击“保存”后,参数将自动写入机器人内部的 /root/car\_ws/src/car\_bringup/config/tags.yaml,下次启动无需重设,也可以直接在代码实验室中打开该文件编辑(不建议)。 * **视野移动操作**:使用鼠标滚轮进行缩放,左键长按点击并拖拽可平移视野,确保全局掌控。 * **目标点设置**:点击“设置目标”后在地图上点击,机器人将自动规划路径并移动(仅测试用) 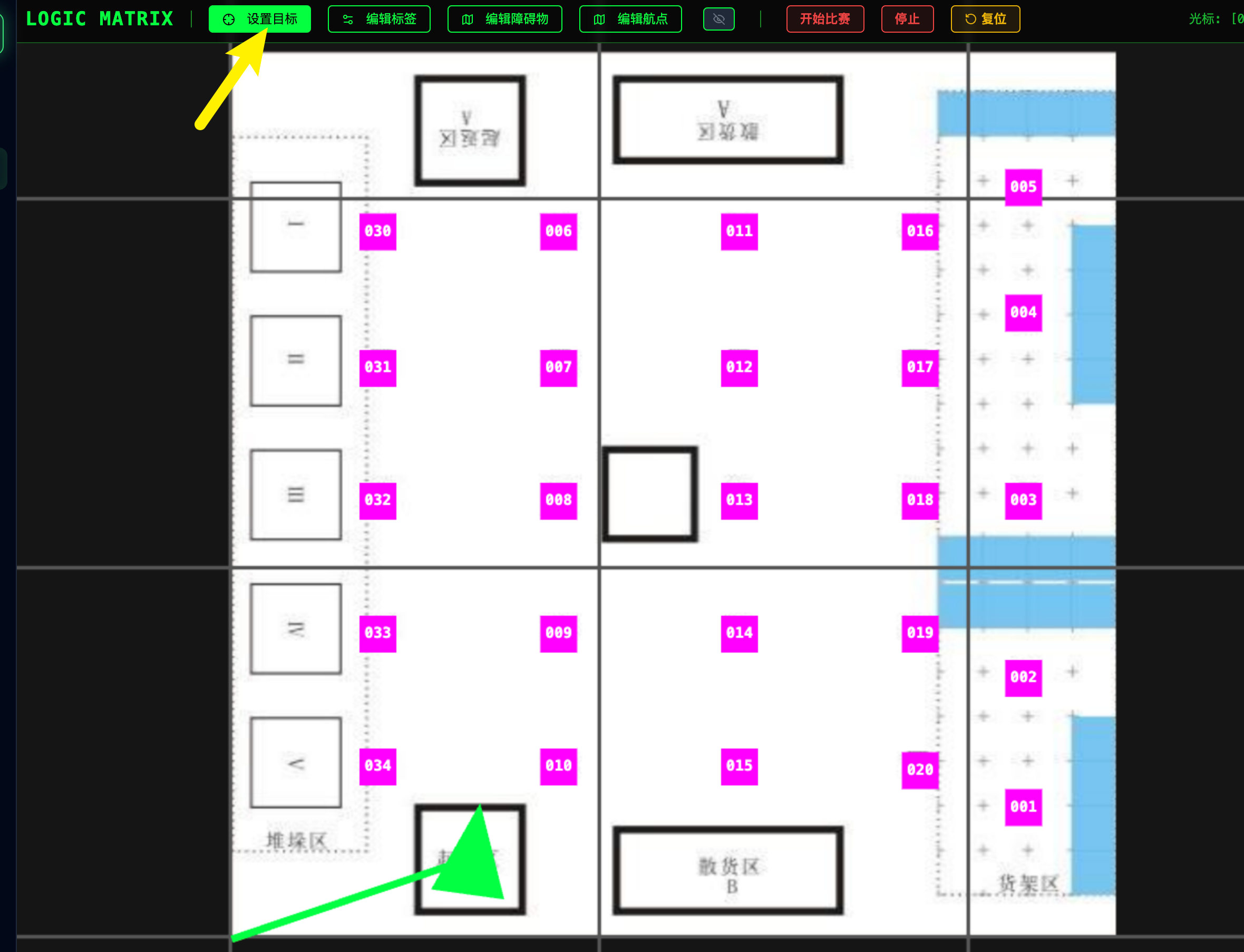 图片 9 ### 货物AprilTag配置 在代码实验室中打开该配置页面 /root/car\_ws/src/competition\_flow/config/competition\_waypoints.yaml ,如下图 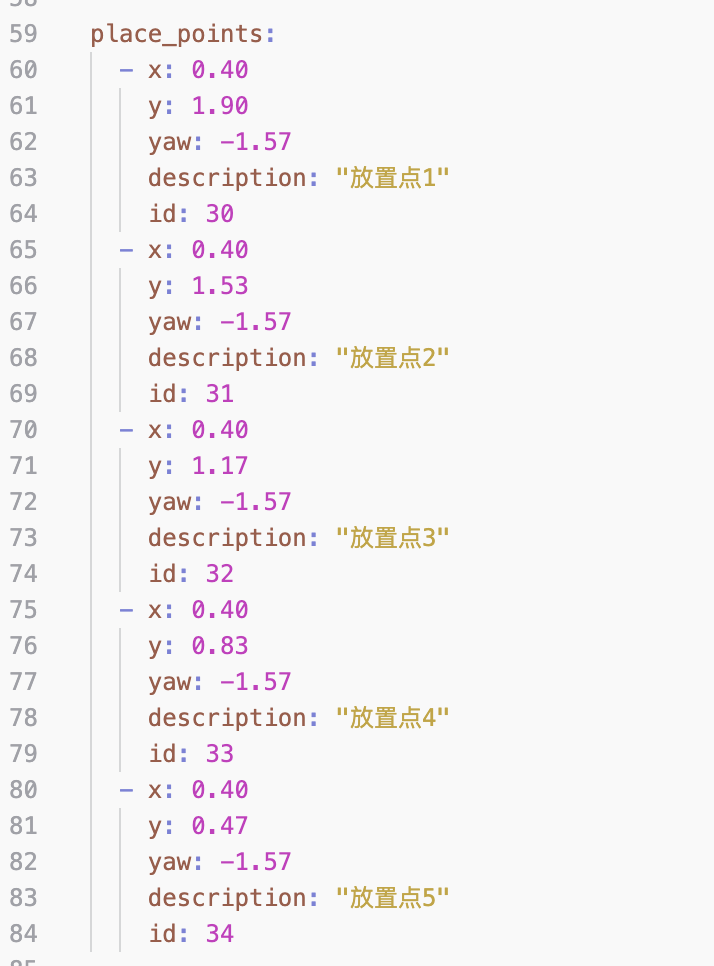 在place\_points段中,可以配置对应放置点中放置货物的AprilTag id。根据实际比赛中货物上的AprilTag id,修改这个配置文件。 例如图中所示,id为30的货物放在放置点1,id为31的货物放在放置点2,以此类推。 ## 航点设置 针对自动化竞赛流程,当货架位置发生改变时,系统支持高度自定义的航点管理: * **类型**:包括取货点(Pick)、放置点(Place)、过渡点(Via)及终点(End)。 * **编辑**:进入“编辑航点”模式,可在地图上直接编辑点位坐标。x坐标和y坐标单位是米。yaw是朝向角度,单位是弧度制。修改完成后点保存即可。也可以增加或删除航点。 * **持久化**:所有航点信息实时同步至 /root/car\_ws/src/competition\_flow/config/competition\_waypoints.yaml 下的配置文件中,掉电不丢失。VIA是途经点。 其中航点标签 P1 到 P5 代表的是 取货点 (Pick Points)。具体意义如下: 1. P代表 Pick(取货/抓取)。1\-5:代表货物的编号。系统默认支持一轮比赛处理 5 组货物(亦可根据现场实际情况进行增加或删除点位),因此对应 P1、P2、P3、P4 和 P5等。 2. 在用户修改地图过程中放置点(Place)和终点(End)一般无需修改校准 3. 其中过渡点(Via)用于机器在前往取货点(Pick)和放置点(Place)前的矫正点位,一般选择靠近取货点(Pick)货架前的位置(确保该位置机器定位摄像头可以看到地面的任一April tag)。 4. 可在取货点(Pick)编辑选择其前后链接的过渡点(Via)。 5\. 运作逻辑 在运行自动比赛流程(Competition Flow)时,小车会按照 P1 → P2 → P3 → P4 → P5 的顺序依次执行以下循环: 导航:在V:to placex完成姿态位置校准后移动到 Px 点位。 扫描 (Scan):在 Px 位姿下启动相机扫描货物的 AprilTag。 抓取 (Pick):根据扫描到的标签 ID 执行机械臂抓取动作。 放置 (Place):在V:to placex完成姿态位置校准后将抓取到的货物搬运至对应的放置点(Place Point)。 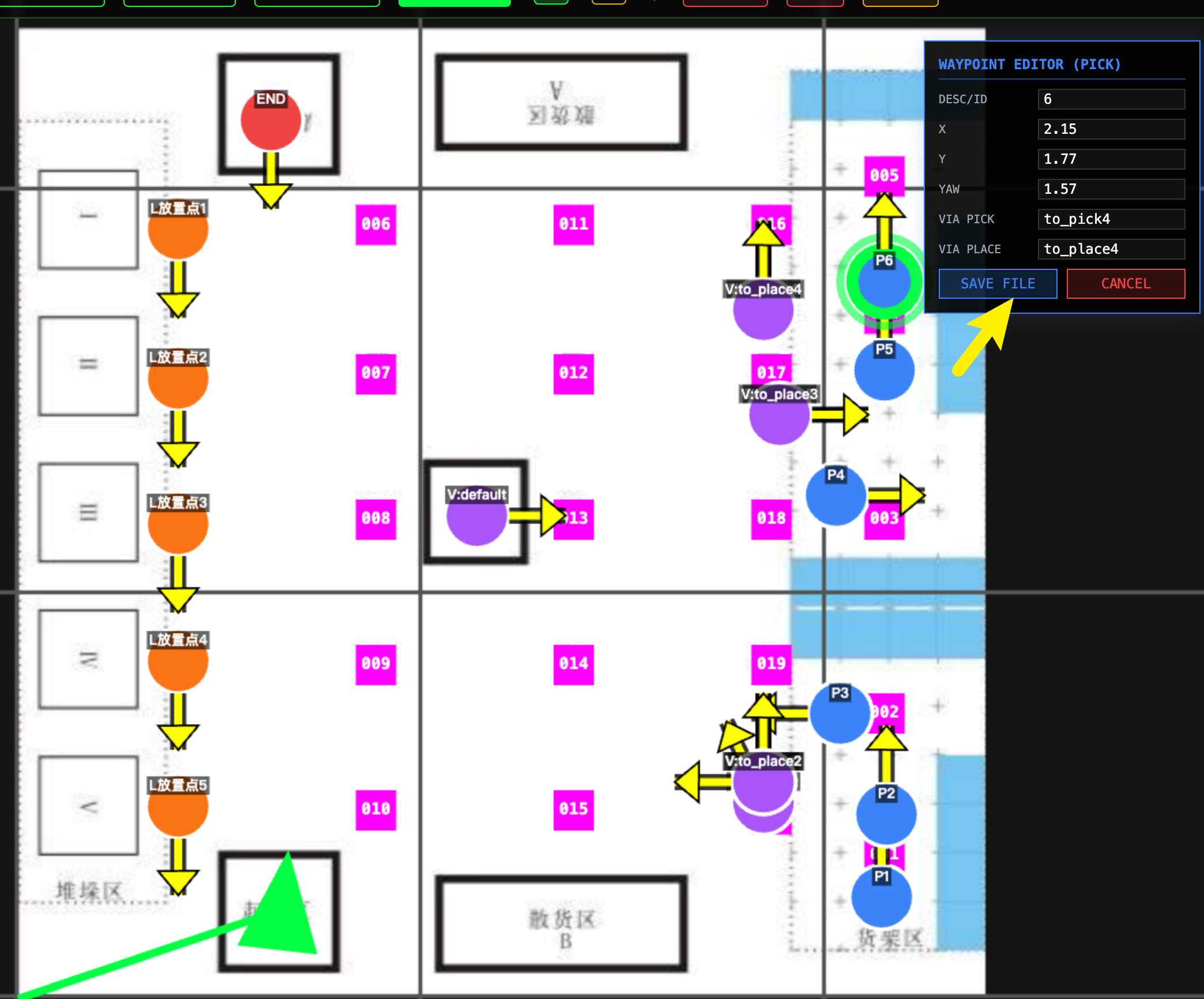 图片 10 #### 关于双车模式的航点任务分配 在配置文件/root/car\_ws/src/competition\_flow/config/competition\_waypoints.yaml中,设置任务分界线: split\_index: 3,表示前3组货物由主车处理,后面的货物由从车处理  同样在配置文件/root/car\_ws/src/competition\_flow/config/competition\_waypoints.yaml中  修改partner\_place\_finish\_delay ,让同伴放完,走完之后,久一点再去放置区。如果遇到双车交错移动的时候容易碰撞的问题,可以适当加长这个时间,或尝试修改途径点。 ## 10\.夹爪角度 夹爪(末端执行器)由舵机驱动: * **夹爪角度预览**: 在软件的逻辑矩阵中点击失能步进电机之后,就可以手动控制电机的位置,确保调整夹爪的时候,夹爪不要干涉。 下面servo\_ctrl栏中,Cover servo (ID\=1\)是盖帽舵机,Left fork servo (ID\=2\)是左边舵机,Right fork servo (ID\=3\) 是右边舵机,输入角度,点击执行三次之后夹爪就可以让夹爪执行到对应的位置。 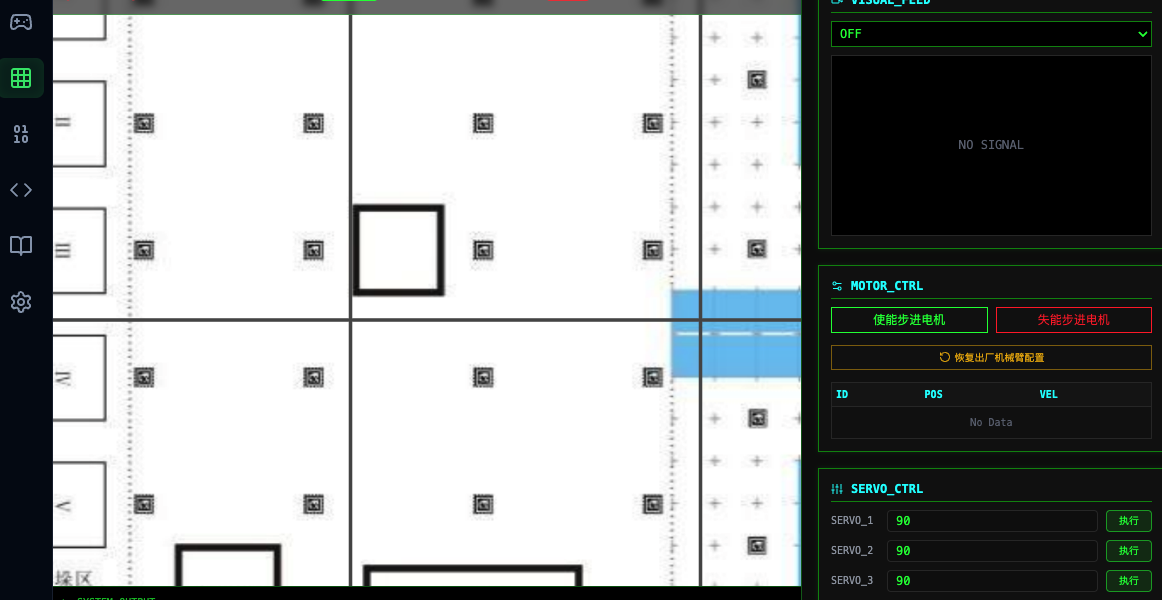 * **自定义比赛夹抓角度**: 可在代码实验室中打开该配置页面/root/car\_ws/src/arm\_control/config/arm\_config.yaml中配置具体的开启/关闭角度阈值。 具体通过修改第9行到第20行配置参数(如图片11所示),其中舵机id可参考1\.2基础介绍章节,Cover servo (ID\=1\)是盖帽舵机,Left fork servo (ID\=2\)是左边舵机,Right fork servo (ID\=3\) 是右边舵机,open\_angle是指夹抓还没抓去货物插进去时候的角度(图片12左),close\_angle是指夹抓插进去撑开货物的角度(下图片12右)。修改完成点击保存并重启机器人即可。 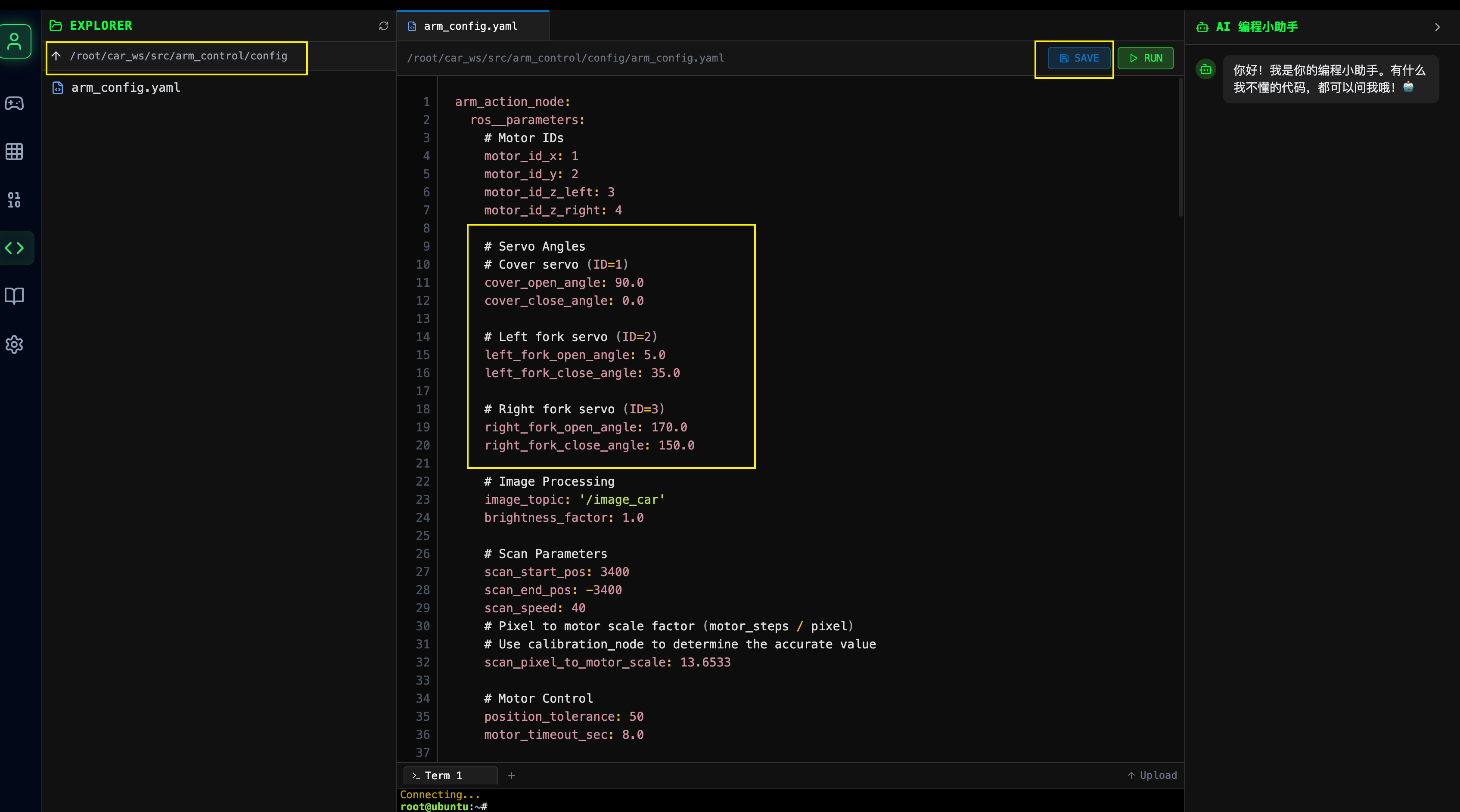 图片 11 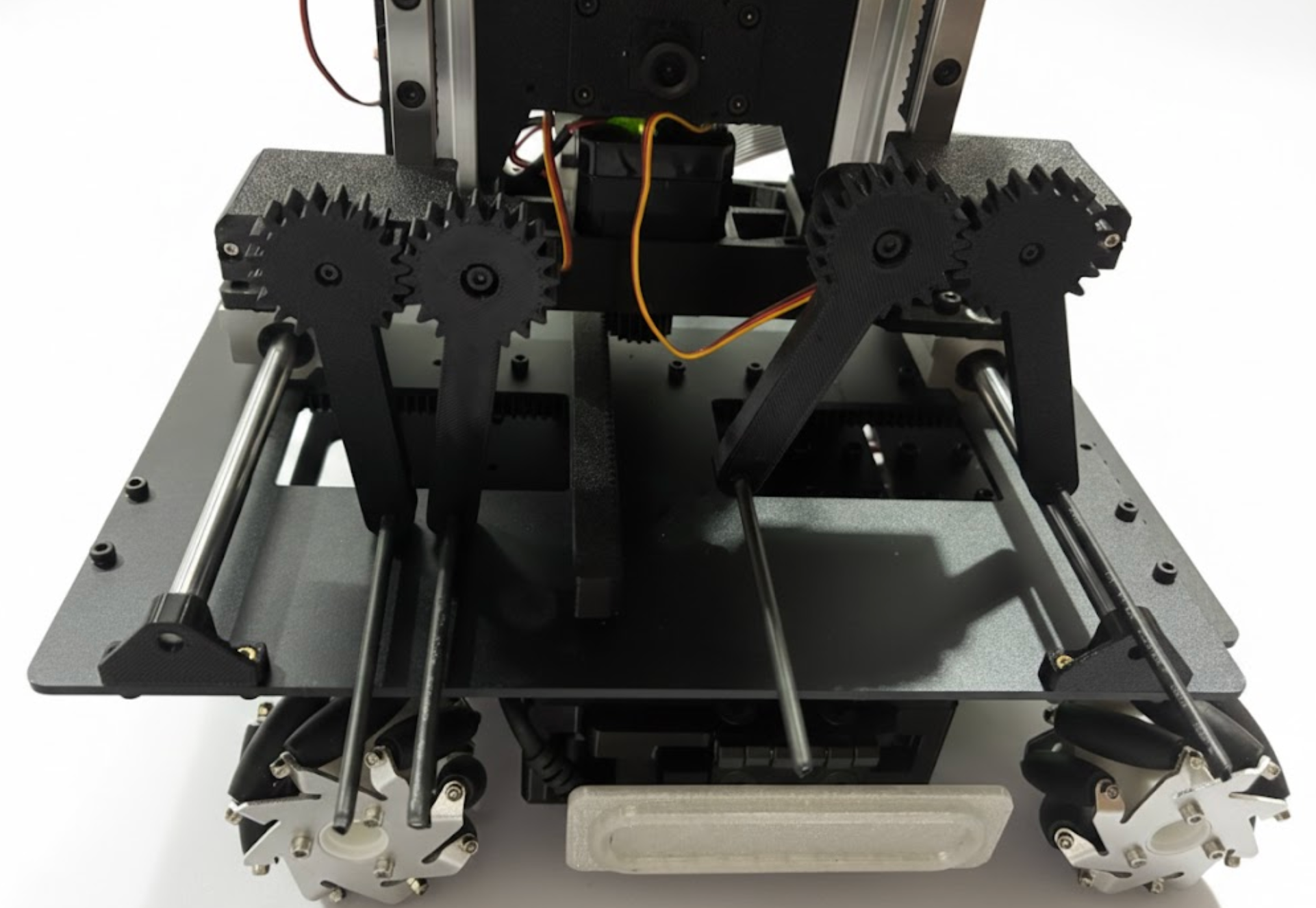 图片 12 ## 11\.机械臂系统设置 机械臂的升降系统(Z 轴)采用步进电机驱动: 遥控模式下,如图片13所示 * **Z1 轴 (U/B 键)**:控制左侧升降高度。 * **Z2 轴 (O/M 键)**:控制右侧升降高度。 * **Y轴 (H/K 键)**:控制Y轴升降高度。 * **X轴 (I/N 键)**:控制X轴升降高度。 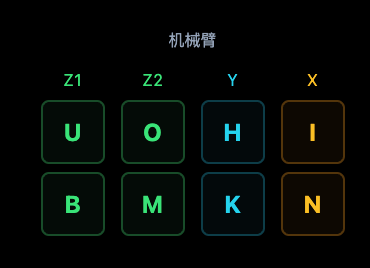 图片 13 ### 高度读取 在逻辑页面下,可通过motor\_ctrl面板进行使能和失能电机读取  图片 14 ### 比赛抓取参数设置 为了确保机械臂精准运行,所有的动作参数均在**/root/car\_ws/src/arm\_control/config/arm\_config.yaml**中定义。以下是核心参数的详细说明: | **参数类别** | **参数名称** | **意义说明** | | --- | --- | --- | | **电机 ID** | motor\_id\_x/y/z\_left/right | 对应轴的步进电机 ID(1\-4) | | **舵机角度** | cover\_open/close\_angle | 顶盖舵机(ID 1)的开关角度 | | | left/right\_fork\_open/angle | 左右拨叉舵机的开关角度阈值 | | **视觉扫描** | scan\_start/end\_pos | 自动对位时,X 轴滑台的左右扫描极限位置 | | | scan\_pixel\_to\_motor\_scale | 图像像素偏差到电机步数的换算系数 | | **高度层级** | place\_height\_level\_1\-4 | 货物对应的四个堆叠高度(1 为最低,4 为最高) | | **抓取逻辑** | pick\_z\_lower/final | 抓取过程中,Z 轴下探的具体步数位置 | | | pick\_y\_extend | 抓取时 Y 轴向前伸出的最大距离 | | **安全限位** | joint\_x/y/z\_min/max | 软限位保护,防止机械臂撞击物理边界 | | **速度设置** | pick/place/home\_speed | 不同动作模式下的全局运动速度配置 | | **回零位置** | home\_x/y/z | 执行“复位”任务后,各轴停留的默认待机坐标 | ## 前置相机曝光调整 目前用于扫描货物apriltag的前置相机使用的是自动曝光,可以满足大部分场景的需求,一般不需要调整。如果遇到特殊光照情况,可以根据现场的光照情况进行调整。 ### 12\.1 相机参数调整 编辑**/root/car\_ws/src/my\_camera\_launch/launch/camera.launch.py** 84\-85行控制自动曝光或手动曝光,以及调整曝光时间 **** ### 12\.2相机参数详解 #### 12\.2\.1 exposure\_auto \- 曝光模式 **作用**:控制曝光是自动还是手动 **常见值**: * 1 (Manual Mode) \= **手动曝光** + 相机使用固定的曝光时间 + 需要手动设置 exposure\_absolute 值 + 适合光照稳定的环境,图像亮度一致 * 3 (Aperture Priority Mode) \= **自动曝光** + 相机根据画面亮度自动调节曝光时间 + 适合光照变化的环境 + exposure\_absolute 值会被忽略 #### 12\.2\.2 exposure\_absolute \- 曝光时间 **作用**:控制传感器曝光的持续时间(仅在手动模式有效) **单位**:通常是 **100微秒** 例如:exposure\_absolute: 150 \= 150 × 100μs \= **15毫秒** **效果**: * **值越大** → 曝光时间越长 → 画面越亮 → 但运动物体更模糊 * **值越小** → 曝光时间越短 → 画面越暗 → 但运动物体更清晰 ### 12\.3参数调节建议 #### 12\.3\.1 场景1:光线太暗 增加曝光时间exposure\_absolute ↑ #### 12\.3\.2 场景2:光线太亮 减少曝光时间 exposure\_absolute ↓ #### 12\.3\.3 场景3:画面模糊(运动物体) 缩短快门时间exposure\_absolute ↓ ## 异常处理 * 若某个电机受损或通讯故障掉线: 1. 界面将弹出红色警告窗。 2. 若频繁掉线,请检查相应电机的通信线缆是否过于紧绷或受损。 3. 若插拔线缆不行,请检查电机条冒是否存在。 4. 若还是不行请联系客服售后。 * **电池电量**:若运动时出现原地旋转或者车身RGB灯黄灯闪烁说明电量不够,请及时更换电池。 ## IMU 校准 若地图界面下显示车的朝向在静止的时候漂移的比较厉害,则需要进行IMU校准 IMU校准操作视频 ## 上手指南教程 ### 15\.1 软件的使用 软件使用讲解教程视频 ### 15\.2 机器人开始比赛 单车模式的时候,将机器放在起返区B,双车的时候将主车(红色指示灯)放在起返区B,从车(蓝色指示灯)放在起返区A。 参考第6点,根据当前的单车或双车的比赛场景,观察车辆状态灯,等待系统启动完成5秒钟后,就可以通过以下两种方式开始比赛,执行的程序均为当前所设置组别及各点位的路径。 #### 15\.2\.1 软件端启动 通过ap模式连接机器,在电脑软件端中点击开始比赛,即可让当前连接的机器开始执行任务。 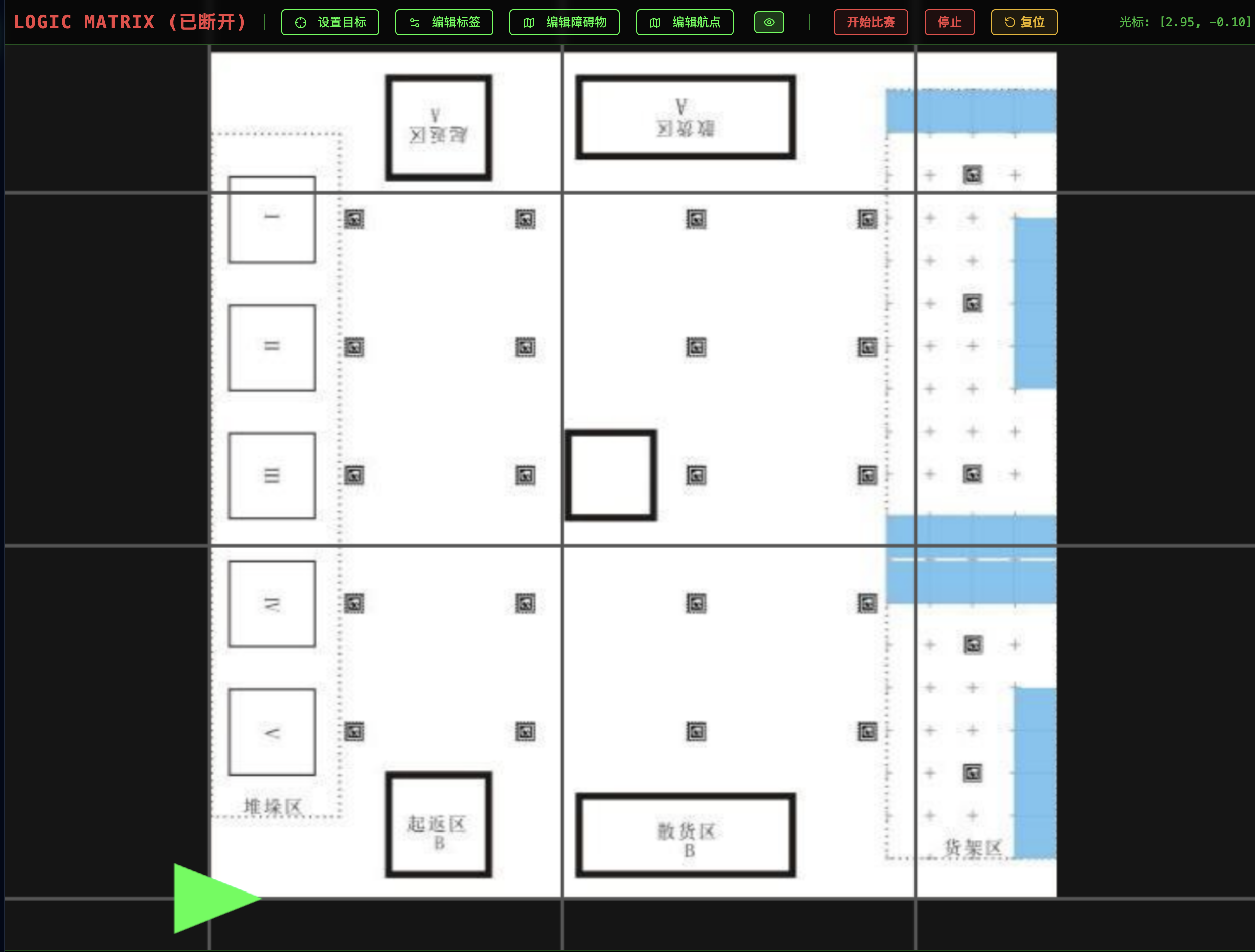  #### 15\.2\.2 按钮启动 点按机器人上的按钮,即可让当前机器开始比赛。 #### 15\.2\.3 关于双车模式的启动说明 通过以上两种方式启动任意一台车,开始任务之后,另一台车将会在约10s后启动开始任务。因此建议让负责点位较多的一台车先开始任务。 ### 15\.3 首次调试高中场地布置 #### 15\.3\.1 场地地图Apriltag(可先阅读学习本手册第8条) 如下图所示绿色为April tag的ID值红色为方向(软件界面截图中粉红色的同为April tag的ID值) 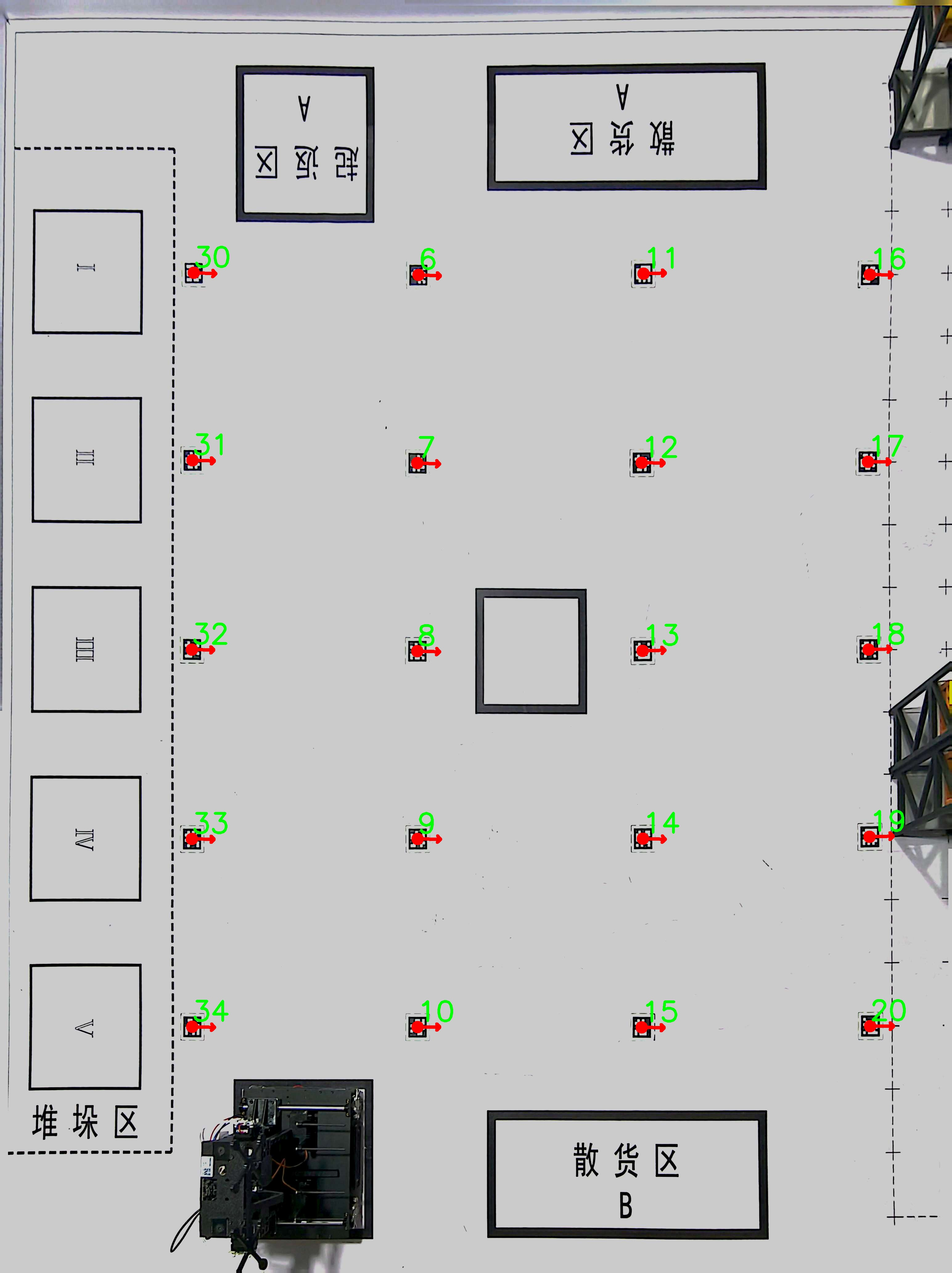 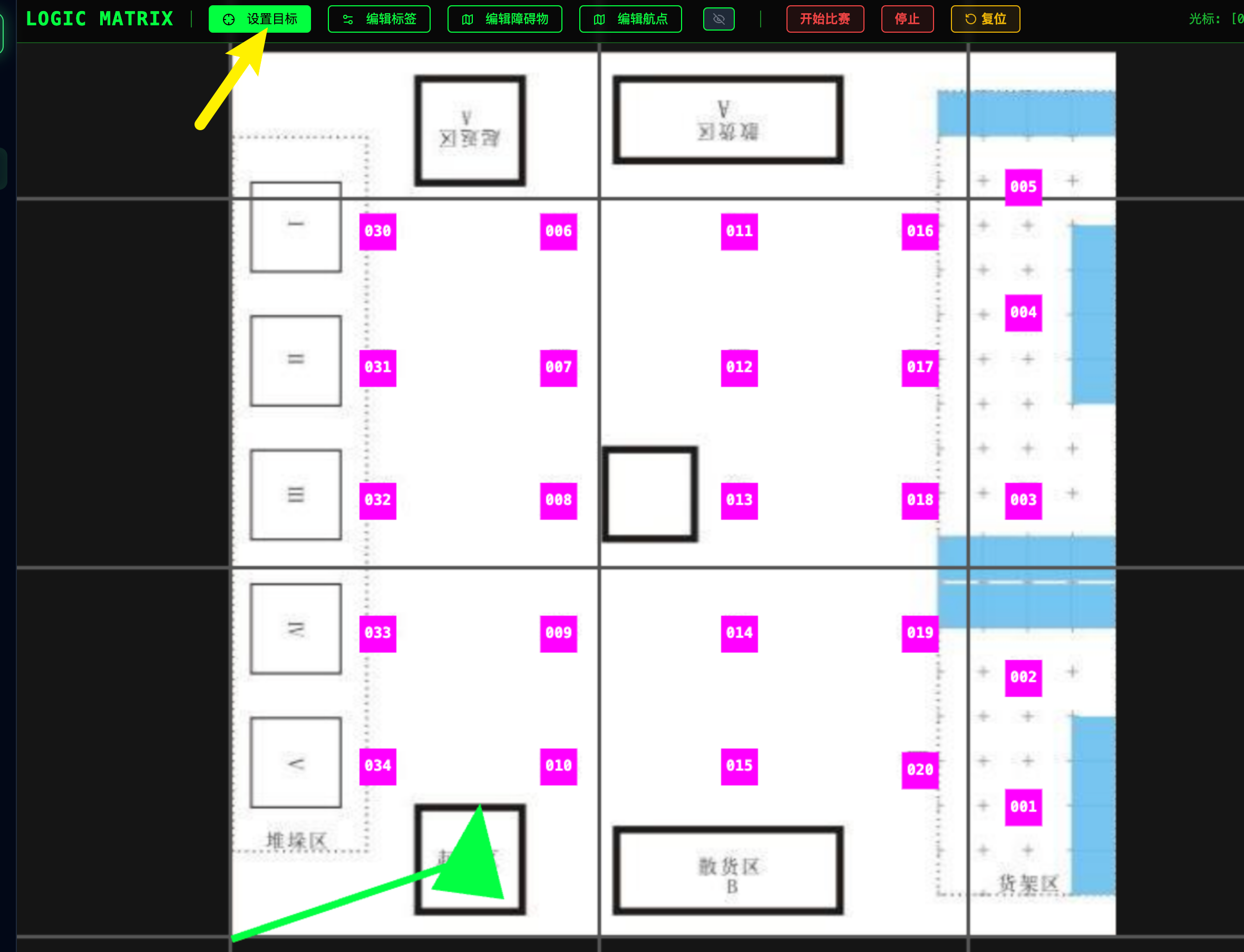 如果有苹果设备(手机/平板)可在app store下载软件Quanti  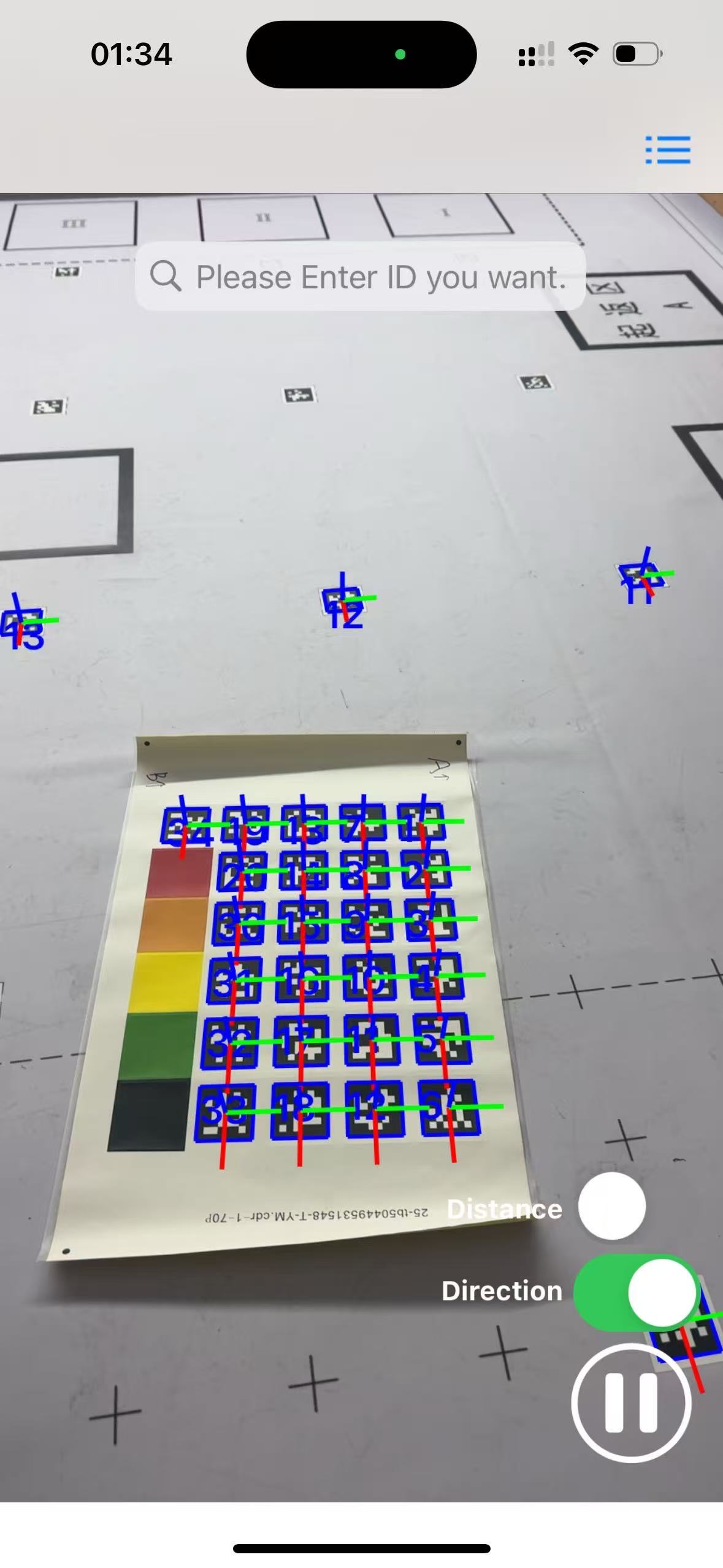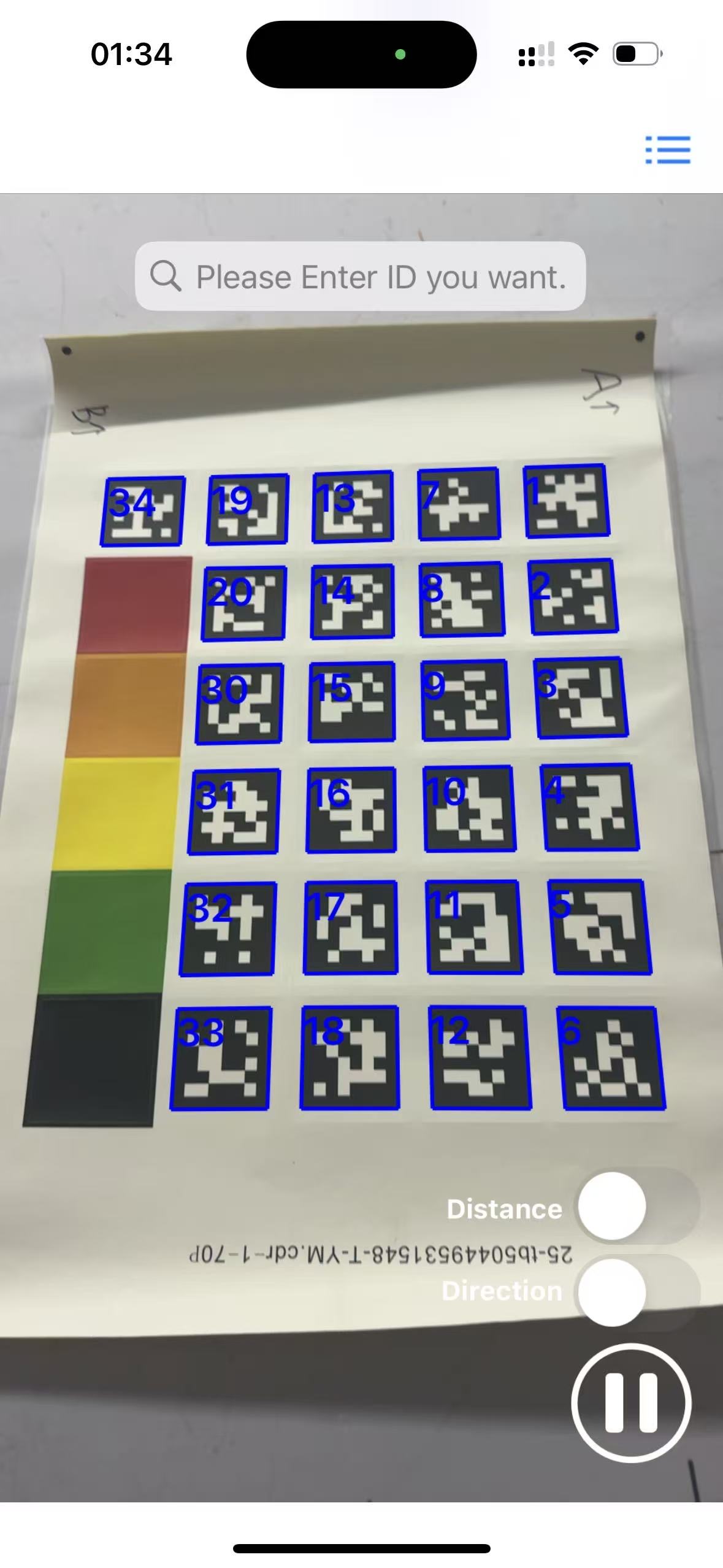 软件内识别赠送的地图贴纸效果如图所示,蓝色数字显示的为Apriltag的ID,打开右下角Direction按钮,红色显示的为方向。如果没有苹果设备的可以直接参考这两张图的识别结果进行粘贴,粘贴时注意,确保Apriltag 的**ID,方向,位置**与上图一一对应。【红色指向货架区】 #### 15\.3\.2 物块Apriltag 使用场地道具赠送的水晶贴贴纸,将Apriltag贴到对应的黄色物块前面正中心的位置,确保同一个托盘上面摆放的物块是相同April tag的物块,如下图所示 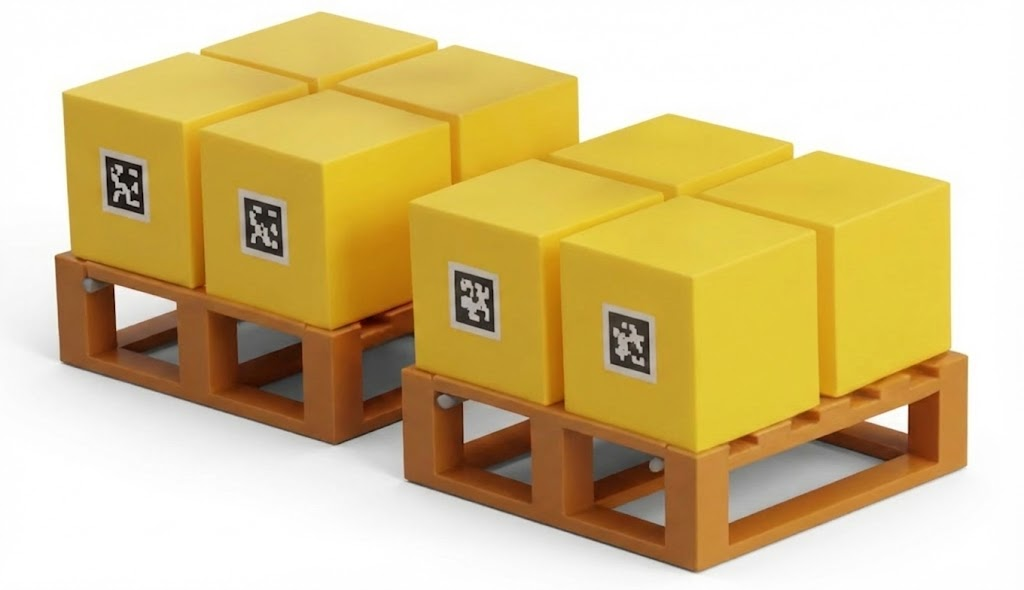 #### 15\.3\.3 货架位置 严格按照规则中地图中(下图为截图)的蓝色长方形位置进行摆放,两个货架为一组,可以通过数货架区的\+号精准摆放货架。 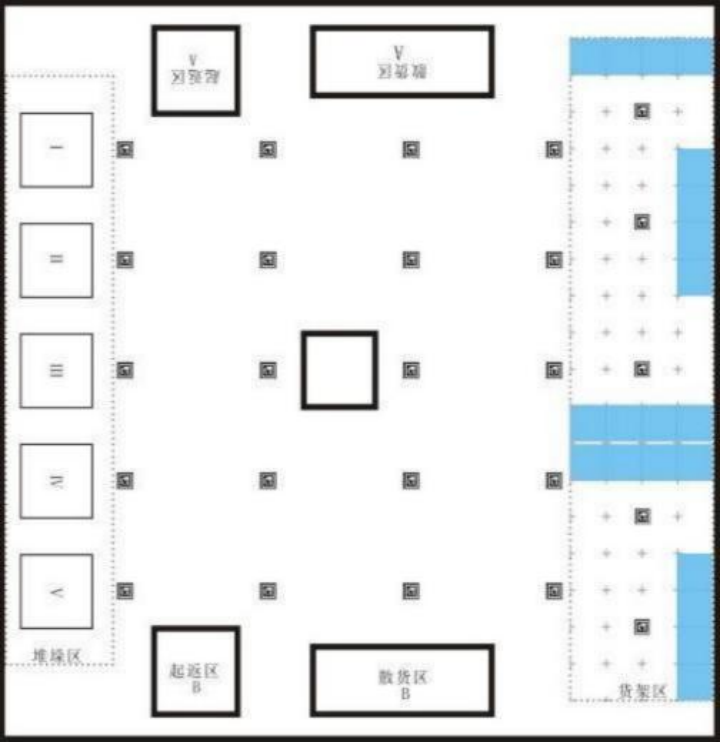 ## 初高中组别赛前注意事项 1. 【特别注意】摆放货物的ID发生改变须修改货物配置ID,详细操作方式请参考第8条货物April tag的配置。 2. 注意观察场地地图货架与训练地图货架摆放是否存在区别,如货架位置发生改变则须修改航点,详细修改可参考手册第9条。 3. 按比赛地图所粘贴April tag进行修改,特别注意方向和ID值均需要修改。修改方式和方向的定义参考第8条Apriltag的配置 4. 机器开机一定按复位要求进行复位,可以先上电,等状态灯变红后点击软件开始比赛或按按钮启动,比赛计时应从此处开始计时。 5. 正式比赛开始前请保证机器电池处于满电状态!低电量会影响机器IMU的校准导致定位不准。
admin
2026年3月26日 09:01
转发
收藏文档
上一篇
下一篇
手机扫码
复制链接
手机扫一扫转发分享
复制链接
分享
链接
类型
密码
更新密码
有效期
Markdown文件
Word文件
PDF文档
PDF文档(打印)
AI