星际探索
1、M6—RCU控制器
2、传感器与执行器
3、RoboEXP
4、拼装积木分类盒使用示意
5、问题合集
6、地址数据
7、PID控制说明
BE-9264 2.4G智控手柄(专业版)
汝城县职业中等专业学校知识库-信息中心朱老师编辑
-
+
首页
5、问题合集
## 关于控制器 ### 1.控制器屏幕失灵如何解决? 「系统设置」→「触屏校正」进入校正界面,根据屏幕提示点击屏幕校正触屏。 ### 2.控制器之间如何实现通讯? 参考“常见问题”-《蓝牙配对》一节。 ### 3.控制器不能播放MP3吗? M6控制器并没有MP3支持,不能播放MP3 ### 4.传感器连接端口不断地在正常读值和999数值之间跳动是因为什么? 因为控制器的固件比较低,可以通过以下方式升级:登录中鸣官网[https://www.zmrobo.com/support/downloads](https://www.zmrobo.com/support/downloads)下载固件文件并上传至控制器中,然后重启控制器就会自动升级。 ### 5.控制器充电口闪红灯是因为什么? 在控制电压过过低时,充电口灯光就会亮红色。 ### 6.控制器声音如何关闭? 「系统设置」→「系统声音」选择“关闭”,触屏时的声音便会关闭。 ### 7.控制器中的数据如何调用? 需要配合Zmrobo中“读取1地址数据值”使用,相当于储存在控制器的变量。如将马达速度设定为地址1数据,当需要更改马达速度时只需在控制器中修改地址数据。 ### 8.控制器使用非官方电池为何不能开启? E6、M6控制器电池不能外接,只能采用标配的锂电池供电,或使用Type-c接口直接供电。 E3控制器电池要求类型为6节AA干电池,或是AA型号的可充锂电池。非此类型电池装机可能会无法供电。 ### 9.为什么控制器连接电脑时,磁盘不显示? 可能为磁盘损坏,需要在控制器「系统设置」→「重置磁盘」,重置磁盘后重启控制器即可。 ### 10.为什么控制器充电时间很久但是电池还没有满格? 控制器可能存在浮动电压导致显示不正确,当电池在8.3V-8.4V时即可理解电池已满电。 ### 11.为什么控制器电量会跳动? 运行时控制器带动电机等照常测量电压的误差,为正常情况。 ### 12.按压控制器开机键无法开机? 一般为电量不足导致无法开机,如电池电量充足请查看控制器电池安装是否有松动。 ### 13.控制器连接电脑时,有弹出磁盘但是连接不上Zmrobo软件? 控制器连接电脑时,有两个作用。 1. 弹出控制器磁盘供下载程序。 2. 将软件和控制器用串口连接可以在线调试。 方式1不需要驱动直接像U盘的方式。方式2需要驱动,连接时电脑会自动安装驱动,但部分精简过的电脑系统可能会缺少,需要手动安装存放在控制器磁盘内的驱动。 请参考下方文档。 需要注意,即使没有“连接”也不影响程序下载,程序会直接下载至控制器磁盘中。 ### 14.控制器显示程序语法错误,怎么解决? 查看程序Python代码,检查对应函数行数。 ### 15.写好的图形化程序,为什么切换到python是空的呢? 点击编程界面"<>"图标才是查看图形化程序对应代码。而软件菜单栏上方的积木/python,是切换不同编程模式。 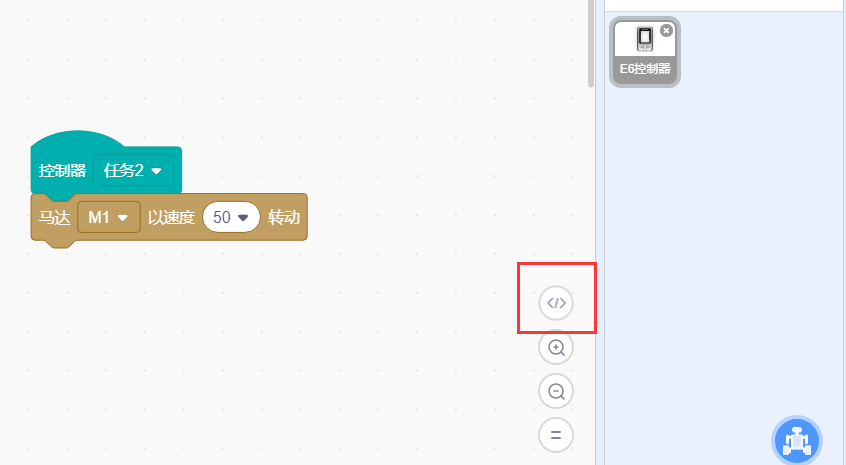 ### 16.为什么控制器连接电脑时,可以显示磁盘,但无法正常打开? 可能是USB接口供电不足导致的,如果是台式电脑,可以把数据线插到主机背面的USB口上,如果是笔记本电脑,则需要增加一个独立供电的USB Hub设备。 ## 关于传感器与执行器 ### 1.声敏传感器为什么在安静的环境下还会有读值? 因外界音量不可能全无,所以数值不会出现0。 ### 2.触碰传感器按压为什么会没有读值? 可能是端口线损坏或传感器损坏,可更换端口线排查原因。 ### 3.调用马达模块为什么马达不运转? 首先应检测端口线是否正常。如端口线正常可在控制器「内置测试」→「马达」,测试正反转检测马达是否正常。 ### 4.马达伺服功能为什么角度不准确? 伺服功能不准确时可在控制器「内置测试」→「编码器」,手动扭转马达,正常情况下马达扭动一周显示数值为360,如更换端口线后,差别仍较大或无读值为马达内置编码器损坏。 需要注意:伺服马达(灰)和伺服马达(橙)一圈的编码值是768,非360。 ### 5.机器人两个马达同时运转相同速度为什么没办法保持直线运动? 每个马达在硬件上均会存在微小偏差,导致机器人略微偏离直线。如需进行直线运动 不能直接用速度(功率),需在程序逻辑上做调整,使用“双马达同步走直线”模块让机器人移动。 双马达同步走直线内置了平衡算法,会在移动时自动调整左右马达功率实现直线移动。  ### 6.马达速度相同时,旋转方向不同是因为什么? 马达具有方向,在控制器「内置测试」→「马达」可更改马达默认方向。 ### 7.马达运行时发出低鸣声是因为什么? 当马达需要运转而被限制转动会发出低鸣声,出现此状况应检查是否有结构卡死导致马达无法运转,防止马达损坏。 ### 8.组装车体时,设置速度相同,但是机器人在转弯? 使用单侧输出的马达时(例如灰色马达),安装车体时马达是左右颠倒的,所以马达同正转或反转都是在旋转。需要处理马达方向,在控制器“内置测试”-“马达”将其中一个马达设置方向为“反”。
admin
2026年5月21日 20:08
转发
收藏文档
上一篇
下一篇
手机扫码
复制链接
手机扫一扫转发分享
复制链接
分享
链接
类型
密码
更新密码
有效期
Markdown文件
Word文件
PDF文档
PDF文档(打印)
AI